|
|
|
|
Applications of the generalized norm solver |
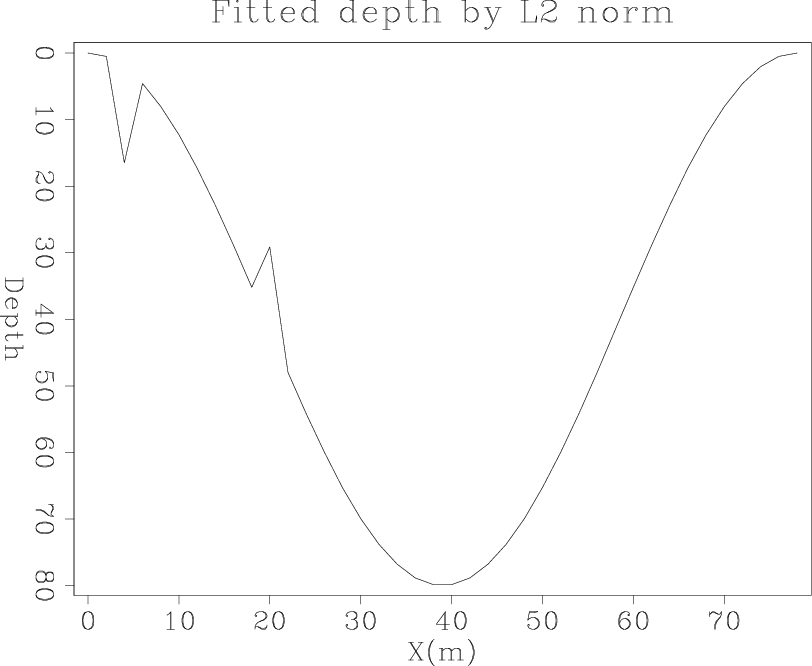
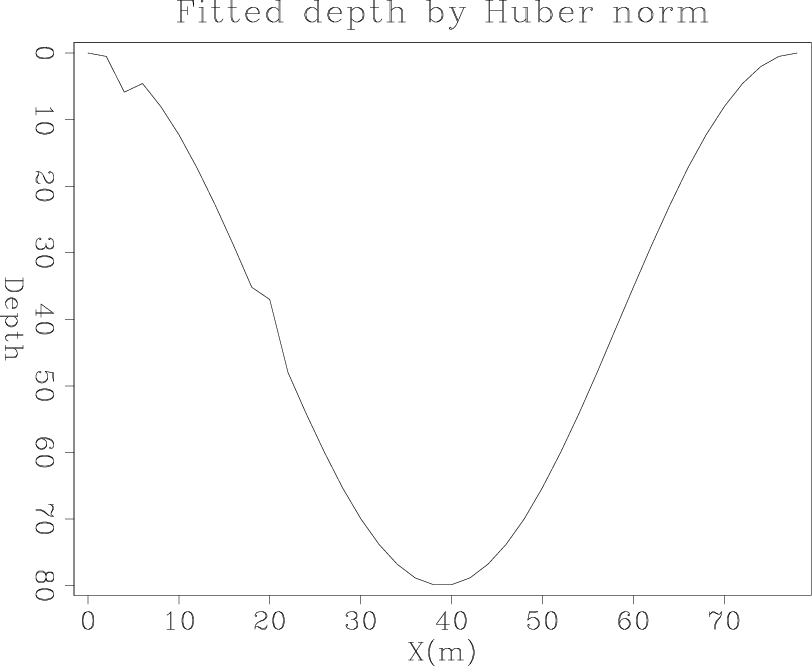
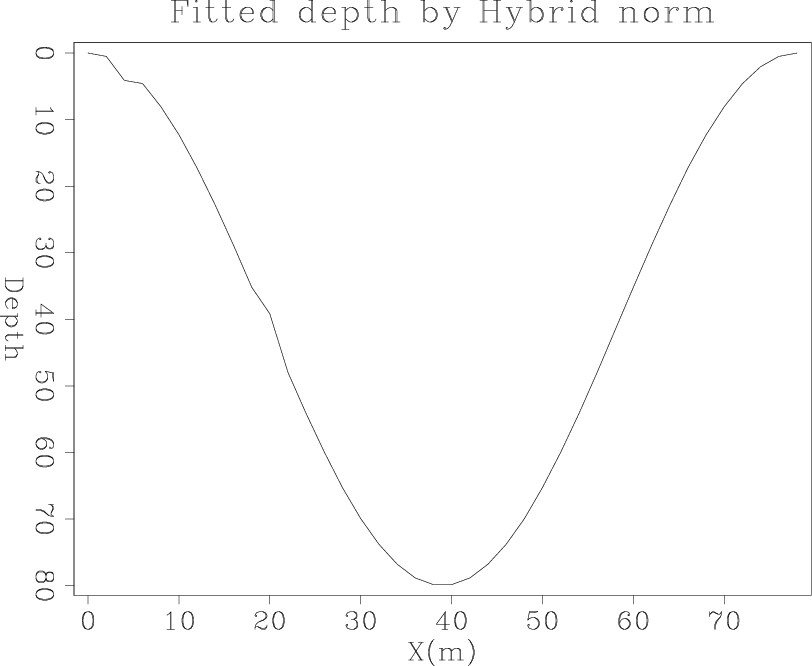
We begin with the simplest test for any L1-type solver, which is the ability to remove outliers in the data. When there is no water-level drift in the Galilee sounding experiment, the data is affected only by random spikes (non-Gaussian noise). The ideal fitted output would be to recover the true depth. The result is shown in figure 5. When we apply the generalized solver to the problem, L2 gives the worst result, as expected, because it cannot isolate outliers from the overall fitting goal. The Huber criteria gives an intermediate result, while the hybrid minimization criteria gives the best result, almost completely recovering the true depth of the lake without distortion.
|
|---|
|
spike-l2,spike-huber,spike-hybrid
Figure 5. Fitting depth for measurements with spiky noise with the generalized norm solver using (a) L2 norm. (b) Huber norm with |
|
|
Next, I apply the solver to the full 1-D Galilee problem, which is the inversion using fitting goals from equation 3 and 4 of data that including drifts and spikes, as shown in Figure 3 (b). The hybrid norm gives the most satisfying result, as summarized in Figure 6. There are two parameters that can be adjusted in this problem: epsilon, which describes the level of regularization, and percentile, which describes the transition point between the ![]() and the
and the  measure (per the defining equations of each norm). Please refer to Claerbout (2009) and Maysami and Moussa (2009) for the definition of each norm. In general, a small epsilon means less weight is placed on the regularization goal, meaning a less smooth result. The percentile parameter allows us to configure the degree of confidence that any randomly-selected data element is a statistical outlier, placing it within either the or the
measure (per the defining equations of each norm). Please refer to Claerbout (2009) and Maysami and Moussa (2009) for the definition of each norm. In general, a small epsilon means less weight is placed on the regularization goal, meaning a less smooth result. The percentile parameter allows us to configure the degree of confidence that any randomly-selected data element is a statistical outlier, placing it within either the or the ![]() fitting goal. If a low percentile is set, it indicates that we believe most of the data should be fitted with
fitting goal. If a low percentile is set, it indicates that we believe most of the data should be fitted with ![]() . For this problem, we have set the percentile to be as low as possible without having a divergent solution. For the Huber solver, the limit is
. For this problem, we have set the percentile to be as low as possible without having a divergent solution. For the Huber solver, the limit is
![]() . We found that the hybrid solver has a better tolerance, and the limit for it is
. We found that the hybrid solver has a better tolerance, and the limit for it is
![]() .
.
In terms of convergence, there are two iterative parameter. The first one is niter, which controls then number of applications of the costly forward and adjoint operators. Another one is psiter which corresponds to the number of iterations of the inner loop that determines the step sizes,  and
and ![]() , in our conjugate direction scheme. We found that when
, in our conjugate direction scheme. We found that when
![]() , we obtain the best result in the full 1-D Galilee problem. For the outer loop parameter, niter, the
, we obtain the best result in the full 1-D Galilee problem. For the outer loop parameter, niter, the ![]() solver converges in just 16 iterations, the Huber solver converges in 36 iterations, and the hybrid solver converges in 66 iterations. Repeated experience indicates that we can always set
solver converges in just 16 iterations, the Huber solver converges in 36 iterations, and the hybrid solver converges in 66 iterations. Repeated experience indicates that we can always set ![]() to one when using the generalized norm solver.
to one when using the generalized norm solver.
|
|
|
|
Applications of the generalized norm solver |