|
|
|
|
Applications of the generalized norm solver |
|
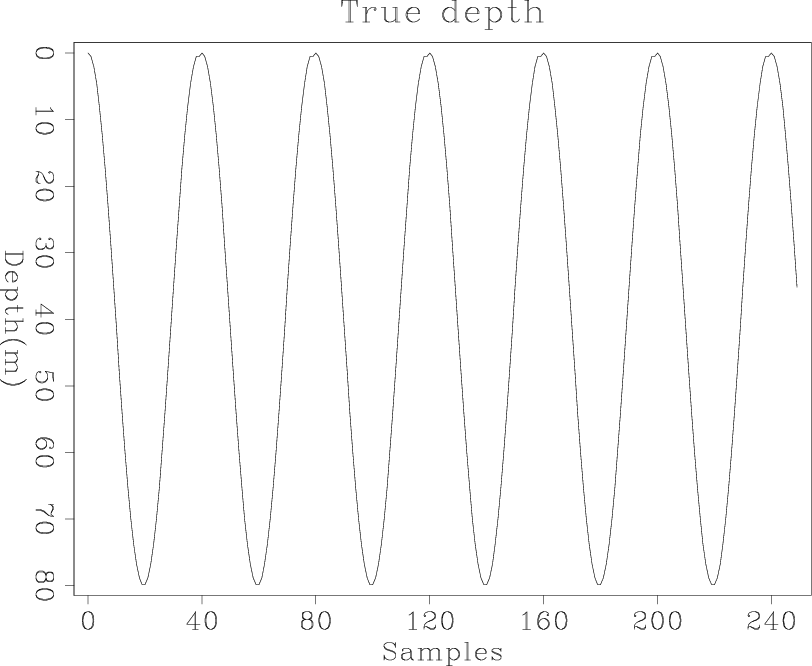
truedepth
Figure 2. The true depth of the Sea of Galilee along a fixed track. [ER] |
|
|---|---|
|
|
|
|---|
|
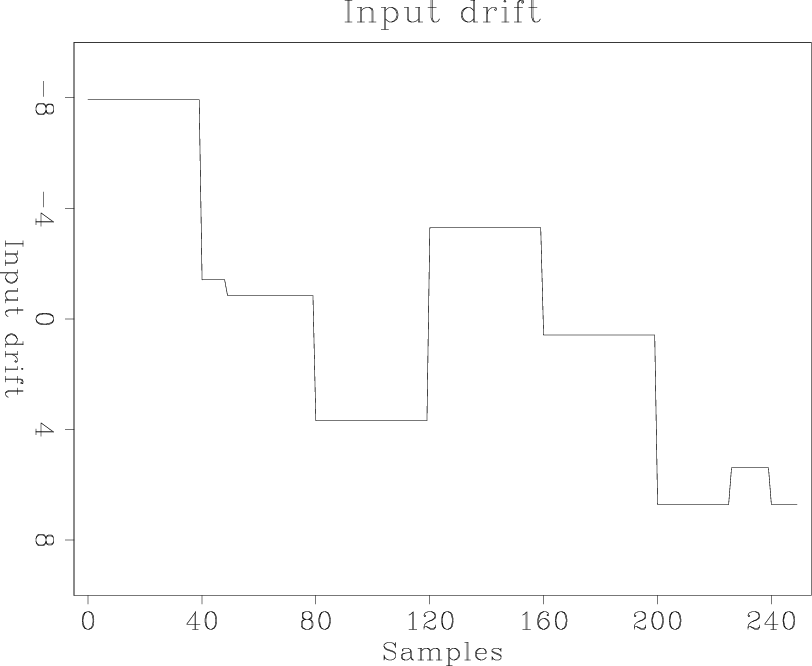
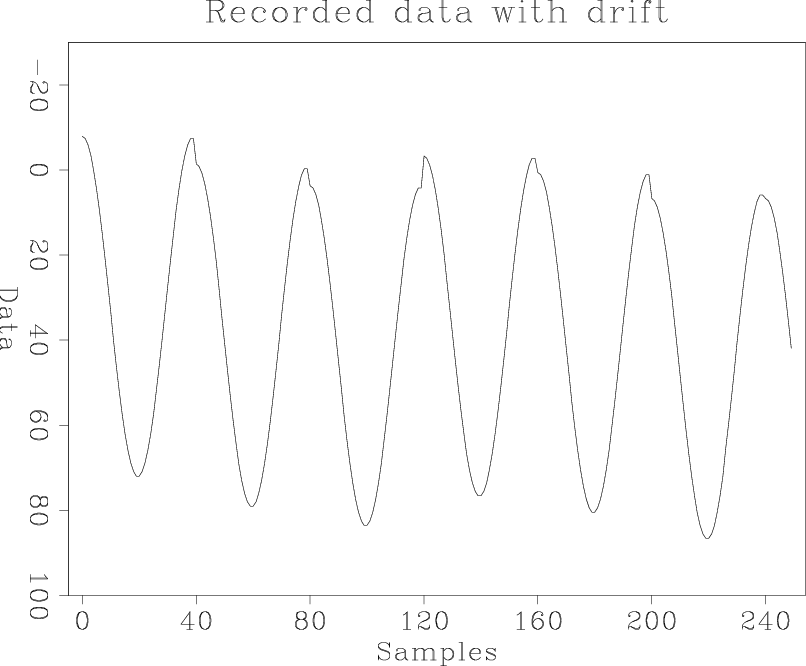
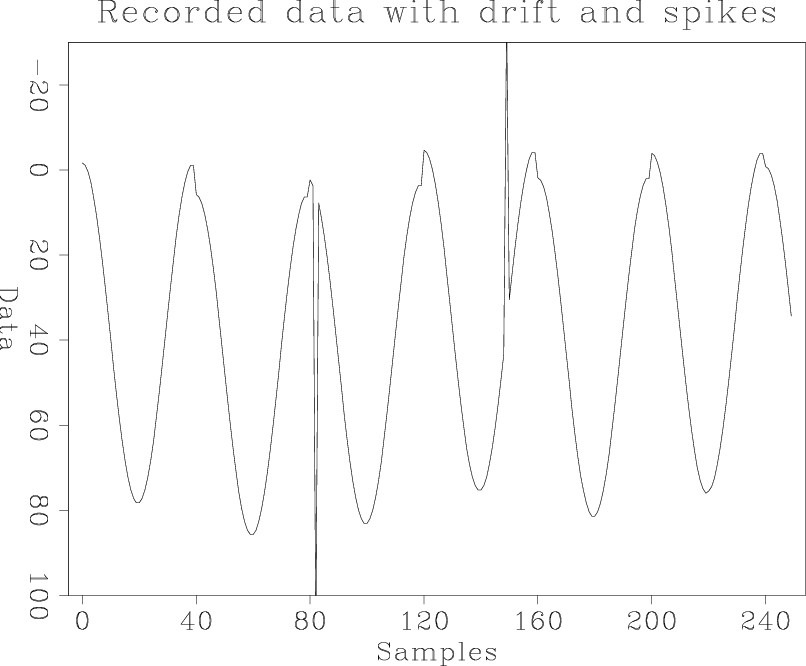
data-drift,data-aq1,data-aq2
Figure 3. (a) The drift as a function of aquisition time. (b) The recorded data, which is the sum of the true lake depth and drift. (c) The recorded data with two outliers. The two spikes are added to the data to account for equipment failure.[ER] |
|
|
To formulate the problem for inversion, we have set our unknown model space to be the lake depth, ![]() , and the drift function,
, and the drift function, ![]() . Data space
. Data space ![]() is the recorded depth as shown in Figure 3.
Our data fitting goal can be defined as
is the recorded depth as shown in Figure 3.
Our data fitting goal can be defined as
where ![]() is the binning operator that matches the data acqusition in time to its corresponding location in space. For a lake with 4 grid points and 6 data points, equation 3 would look like this:
is the binning operator that matches the data acqusition in time to its corresponding location in space. For a lake with 4 grid points and 6 data points, equation 3 would look like this:
Equation 3 by itself is an under-determined problem, because there are more unknowns than the recorded data points. If there are 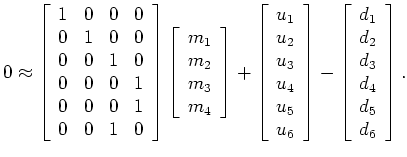 data points and the lake has
data points and the lake has ![]() grid points, then the model space has a dimension of
grid points, then the model space has a dimension of ![]() , because we are solving for both lake depth and drift in time. The data space has a dimension of . To introduce more constraints, we can add a regularization by requiring the drift function
, because we are solving for both lake depth and drift in time. The data space has a dimension of . To introduce more constraints, we can add a regularization by requiring the drift function ![]() to be smooth,
to be smooth,
It is worth pointing we only expect good results when we run this regularization with  or -type norms, as
or -type norms, as ![]() smoothing will wipe out the ``blockiness" in the drift function, which is part of the model space. To illustrate the limitation of least-squares fitting, I will first show the result of applying inversion to the 1D Galilee problem.
smoothing will wipe out the ``blockiness" in the drift function, which is part of the model space. To illustrate the limitation of least-squares fitting, I will first show the result of applying inversion to the 1D Galilee problem.
|
|
|
|
Applications of the generalized norm solver |