|
|
|
|
Wave-equation tomography for anisotropic parameters |
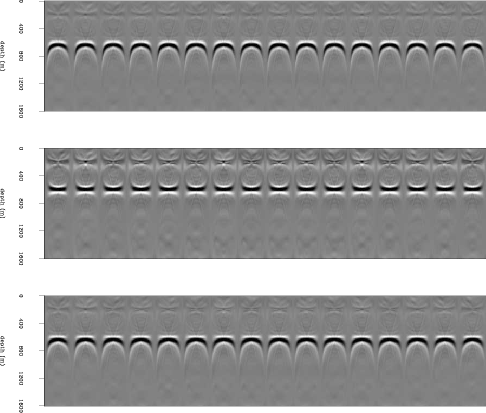
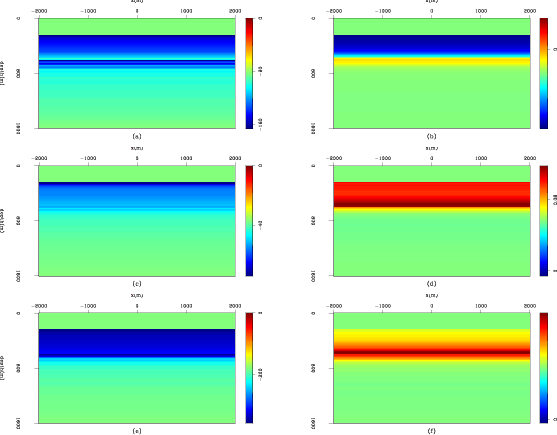
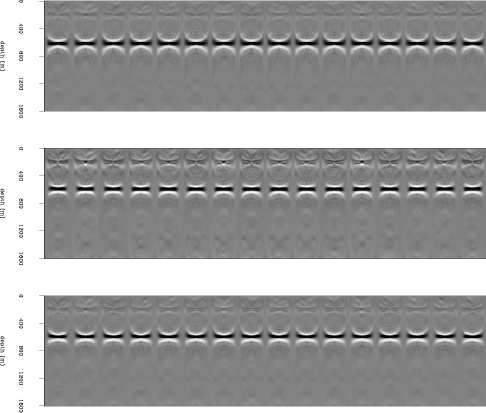
In these three tests, we use the same initial model (Figure 5), but data modeled using different true models. In Figure 6 we show the true model perturbations, which have one layer of perturbations in slowness only, in ![]() only, and in both. Figure 7 shows the angle-domain common image gathers (ADCIGs) using the initial model, where ADCIGs are not flat due to the error in the model. Notice the image perturbation is small for the perturbation in
only, and in both. Figure 7 shows the angle-domain common image gathers (ADCIGs) using the initial model, where ADCIGs are not flat due to the error in the model. Notice the image perturbation is small for the perturbation in ![]() only.
only.
In the inversion, we define the focusing operator in the perturbed image (Equation 7) by the Differential Semblance Optimization (DSO) method (Shen, 2004):
 is the subsurface half-offset.
Since the DSO operator is independent of the model parameters, the gradient of
is the subsurface half-offset.
Since the DSO operator is independent of the model parameters, the gradient of
|
|---|
|
init
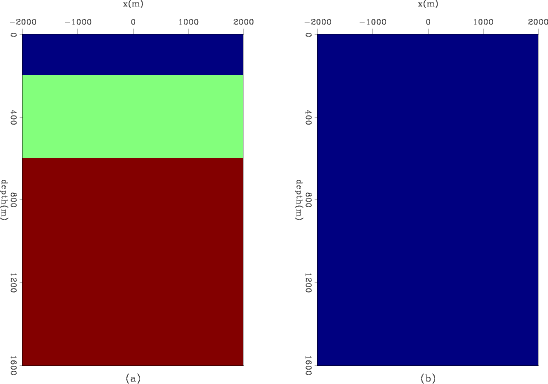
Figure 5. Initial model for inversion. Panel (a) is the initial velocity model with three layers; Panel (b) is the initial |
|
|
|
|---|
|
truep
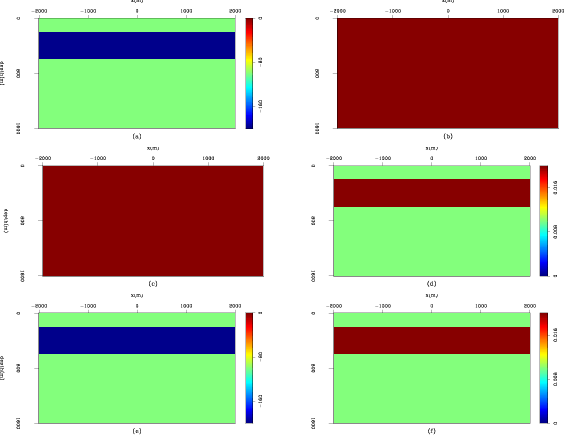
Figure 6. True model perturbation in three test cases. Panel (a) and (b): Perturbation in velocity only; Panel (c) and Panel (d): Perturbation in |
|
|
|
|---|
|
initimage
Figure 7. ADCIGs using the initial model in three cases. Top panel: Perturbation in velocity only; Middle panel: Perturbation in |
|
|
|
|---|
|
update
Figure 8. Inversion results of the three test cases. Panels are comparable to those in Figure 6. |
|
|
|
|---|
|
finalimage
Figure 9. Common image gathers using the updated model in three cases. Top panel: Perturbation in velocity only; Middle panel: Perturbation in |
|
|
Figure 8 shows the final model updates after 4 non-linear iterations. The results should be comparable to the model perturbations in Figure 6. In the final updates, we see a consistent over predition of ![]() . This is because error in
. This is because error in ![]() has a very smal contribution in the image perturbation, as shown in the middle panel of Figure 7. Figure 9 shows the ADCIGs using the updated model. Comparing Figure 6 and Figure 8, Figure 7 with Figure 9, we can conclude that the inversion successfully identifies the layered perturbation and flattens the ADCIGs. However, back-projection of the residual image shows up in both parameter spaces, although it is caused by perturbations in a single parameter. Also for the case of perturbing both spaces, the over-prediction of velocity perturbation and the under-prediction of
has a very smal contribution in the image perturbation, as shown in the middle panel of Figure 7. Figure 9 shows the ADCIGs using the updated model. Comparing Figure 6 and Figure 8, Figure 7 with Figure 9, we can conclude that the inversion successfully identifies the layered perturbation and flattens the ADCIGs. However, back-projection of the residual image shows up in both parameter spaces, although it is caused by perturbations in a single parameter. Also for the case of perturbing both spaces, the over-prediction of velocity perturbation and the under-prediction of ![]() perturbation reconcile with each other and produce flat events in the ADCIGs. Therefore, we can conclude that the ambiguity between the velocity and the anellipticity cannot be resolved simply by the inversion, and auxiliary information is needed to further distinguish the difference.
perturbation reconcile with each other and produce flat events in the ADCIGs. Therefore, we can conclude that the ambiguity between the velocity and the anellipticity cannot be resolved simply by the inversion, and auxiliary information is needed to further distinguish the difference.
|
|
|
|
Wave-equation tomography for anisotropic parameters |