|
|
|
|
Selecting the right hardware for Reverse Time Migration |
The core computation of RTM is finite-difference-based 3D
convolutions, which normally perform multiplications and additions on a number
of adjacent points. While the points are neighbors to each other in a 3D geometric
perspective, they are often stored relatively far apart in memory. For example,
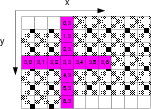
in the 7-point 2D convolution performed on a 2D array shown in
Figure 7, data items  and
and ![]() are
neighbors in the
are
neighbors in the ![]() direction. However, suppose the array uses a row-major
storage and has a row size of 512, the storage locations of and
direction. However, suppose the array uses a row-major
storage and has a row size of 512, the storage locations of and ![]() will be 512 items (one line) away. For a 3D array of the size
will be 512 items (one line) away. For a 3D array of the size
![]() ,
the neighbors in the
,
the neighbors in the ![]() direction will be
direction will be ![]() items (one slice) away.
In software implementations, this memory storage pattern can incur a lot of
cache misses when the domain gets larger, and decreases the efficiency of the computation.
items (one slice) away.
In software implementations, this memory storage pattern can incur a lot of
cache misses when the domain gets larger, and decreases the efficiency of the computation.
|
|---|
|
convolution-2D
Figure 7. A streaming example of 2D convolution.[NR] |
|
|
In an FPGA implementation, we use BRAMs to store a window of the input stream and enable
the circuit to compute one result per cycle. Figure 7
demonstrates this concept.
Suppose we are applying the stencil on the data item ![]() , meaning the circuit requires 13
different values (shown in red). As the data items are streamed in one by one, in order
to make the values from to
, meaning the circuit requires 13
different values (shown in red). As the data items are streamed in one by one, in order
to make the values from to ![]() available to the circuit, we use BRAMs to
buffer the window of all the six lines of input values from to
available to the circuit, we use BRAMs to
buffer the window of all the six lines of input values from to ![]() (shown
in grey grid). In the next cycle, the first value pops out of the window,
as is no longer needed for the following computation. Meanwhile, the next
value
(shown
in grey grid). In the next cycle, the first value pops out of the window,
as is no longer needed for the following computation. Meanwhile, the next
value ![]() is pushed into the window buffer, as
is pushed into the window buffer, as ![]() is needed for the next
stencil operation.
is needed for the next
stencil operation.
Considering the BRAMs as the `cache' of an FPGA design, the above window
buffer mechanism provides a perfect `cache' behavior: firstly, the data item gets
streamed into the window buffer at exactly the cycle that the data item is needed
for the computation for the first time; secondly, the data item only resides in the
window buffer for the period of time that the data item is needed for the computation.
Current BRAMs can hold 6MB of data, or 1.5 million elements, when the data is stored as float.
The window size that needs to be buffered is proportional to ![]() , where
, where ![]() is the spatial derivative approximation. For large data volumes and high
order stencils, this exceeds current BRAM storage, requiring domain decomposition. The
size of BRAM tends to follow Moore's Law, doubling every 18 months.
is the spatial derivative approximation. For large data volumes and high
order stencils, this exceeds current BRAM storage, requiring domain decomposition. The
size of BRAM tends to follow Moore's Law, doubling every 18 months.
|
|
|
|
Selecting the right hardware for Reverse Time Migration |