Angle-domain common-image gathers in generalized coordinates
Next:
Numerical Examples
Up:
Canonical Examples
Previous:
Sheared Cartesian Coordinates
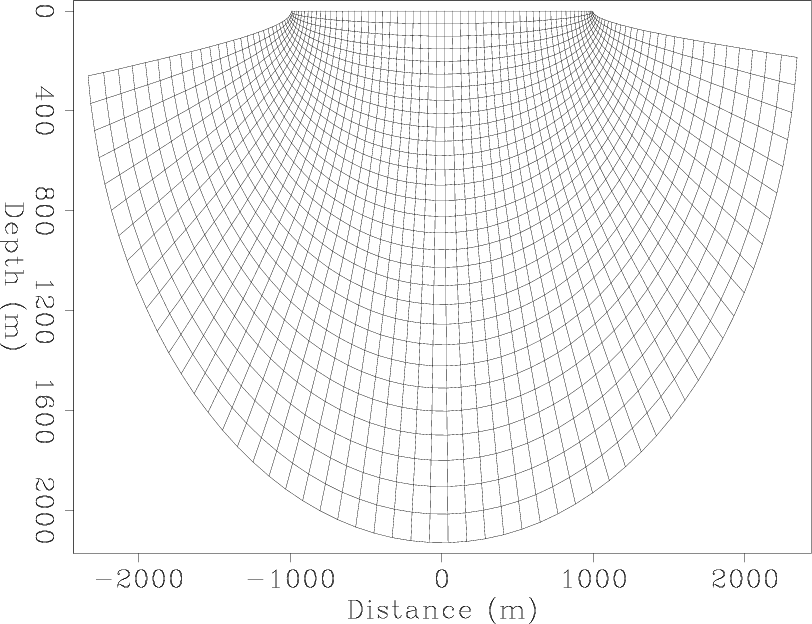
Elliptic Coordinates
The elliptic coordinate system (see figure
3
) is defined by
(20)
The transformation matrix is defined by
(21)
which leads to the following differential travel-time equations
(22)
The computation for the ADCIG in elliptic coordinates is given by
(23)
Thus, ADCIGs calculated in elliptic coordinates directly yield the reflection opening angle without any additional filtering.
EC
Figure 3.
Example of an elliptic coordinate system. [
NR
]
Angle-domain common-image gathers in generalized coordinates
Next:
Numerical Examples
Up:
Canonical Examples
Previous:
Sheared Cartesian Coordinates
2009-04-13
![$\displaystyle \left[ \begin{array}{cc}
\frac{\partial x_1}{\partial \xi_1}& \fr...
...{\rm cos} \,\xi_1 & {\rm cosh} \,\xi_3 \, {\rm sin}
\,\xi_1
\end{array}\right],$](img51.png)
![$\displaystyle \left[ \begin{array}{c}
\frac{\partial t}{\partial h_{\xi_1}}\\
...
...gamma \,( a \, {\rm cosh} \, \xi_3 \, {\rm sin} \, \xi_1 )
\end{array} \right].$](img52.png)