|
|
|
|
Seismic tomography with co-located soft data |
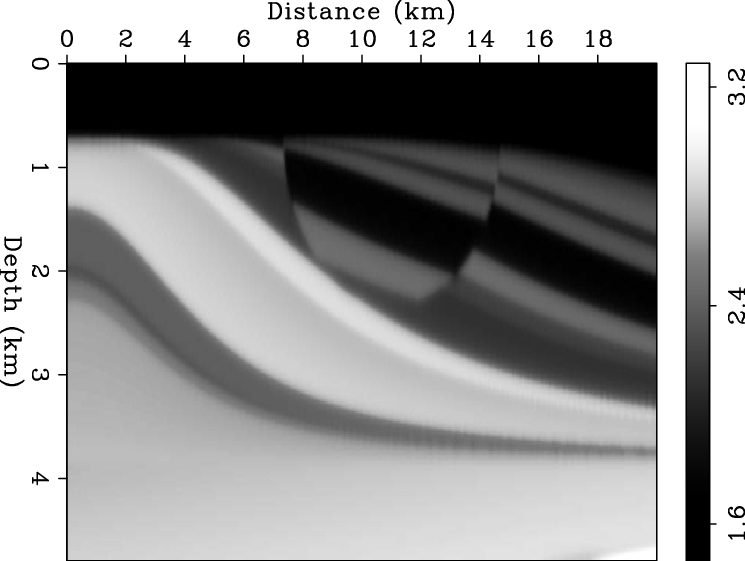
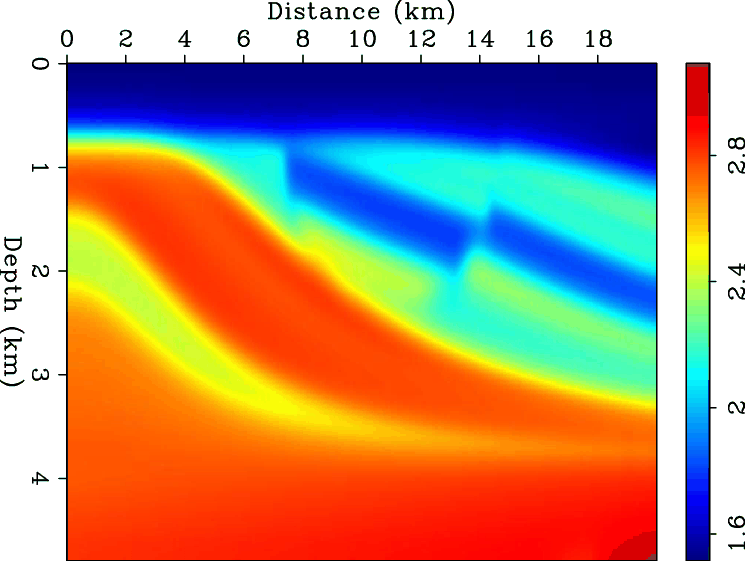
Figure 3 shows a velocity map and corresponding resistivity map of a synthetic 2-D model. That includes a water velocity of about
![]() at the top and a semi-circular fault in the middle of the ocean bottom. There are also laterally smooth velocity anomalies in the model. The resistivity profile and velocity profile are connected using the Archie/time-average cross-property relation (Carcione et al., 2007) with arbitrary parameter values.
at the top and a semi-circular fault in the middle of the ocean bottom. There are also laterally smooth velocity anomalies in the model. The resistivity profile and velocity profile are connected using the Archie/time-average cross-property relation (Carcione et al., 2007) with arbitrary parameter values.
|
|---|
|
vel-t,softdata1-0
Figure 3. Synthetic sinusoidal model with (a) two velocity anomalies and corresponding (b) resistivity model. [ER] |
|
|
We use the resistivity map as soft data to constrain the tomography problem with the cross-gradient function. In this case, we can write the cross-gradient function given in equation 2 as a
linear operator
![]() on the slowness field,
on the slowness field,
![]() . We can then
extend the linearized tomography problem by employing
. We can then
extend the linearized tomography problem by employing
![]() as an additional constraint. The objective function,
as an additional constraint. The objective function,
![]() ,
of this extended problem becomes
,
of this extended problem becomes
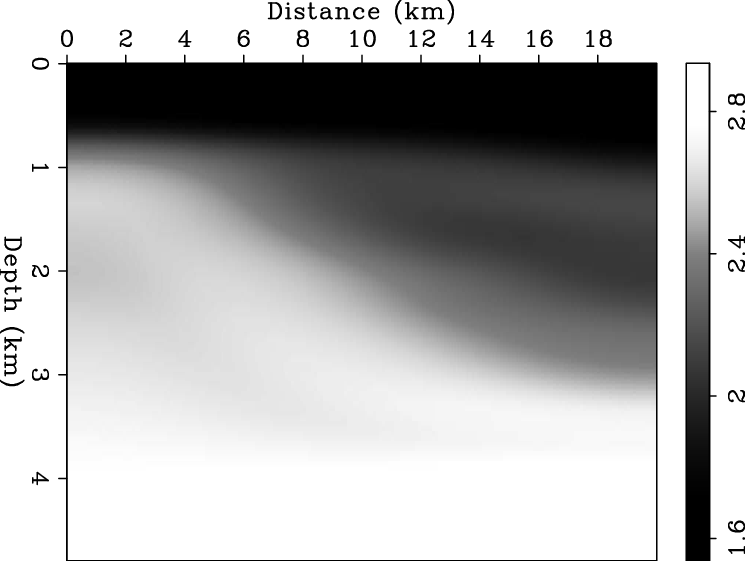
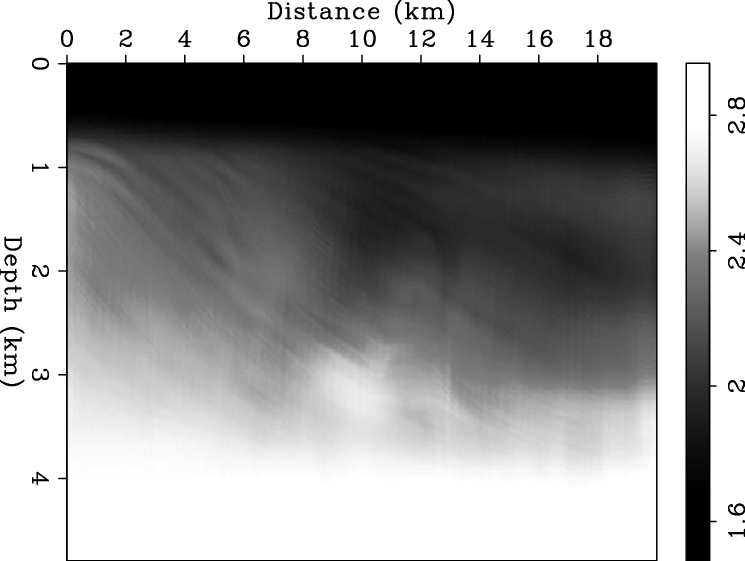
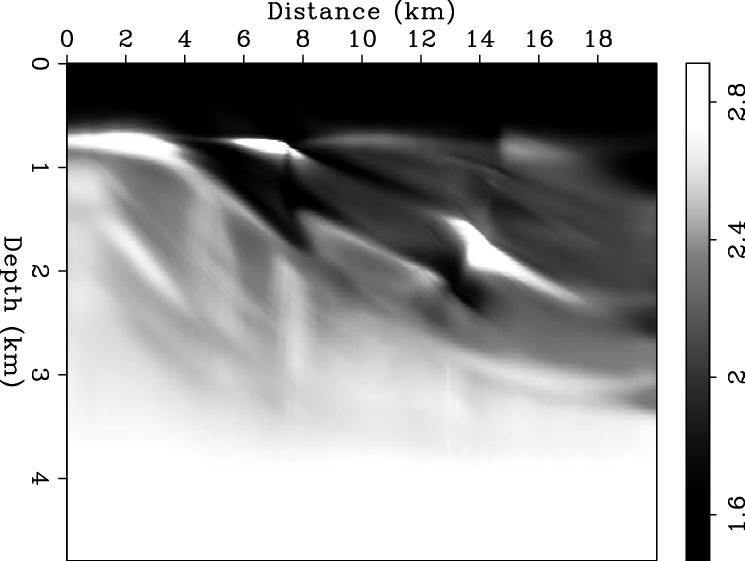
Figure 4 shows the initial velocity and the estimated velocities found by solving the tomography problem both with steering filters and the cross-gradient constraint.
|
|---|
|
vel-0,vel-ds0,velx-dsx0
Figure 4. Velocity estimates by seismic tomography: Initial velocity estimate (a) and estimated velocity (b) with steering filers and (c) with cross-gradient constraint on soft-data. [CR] |
|
|
|
|
|
|
Seismic tomography with co-located soft data |