|
|
|
|
Image-space wave-equation tomography in the generalized source domain |
|
|---|
|
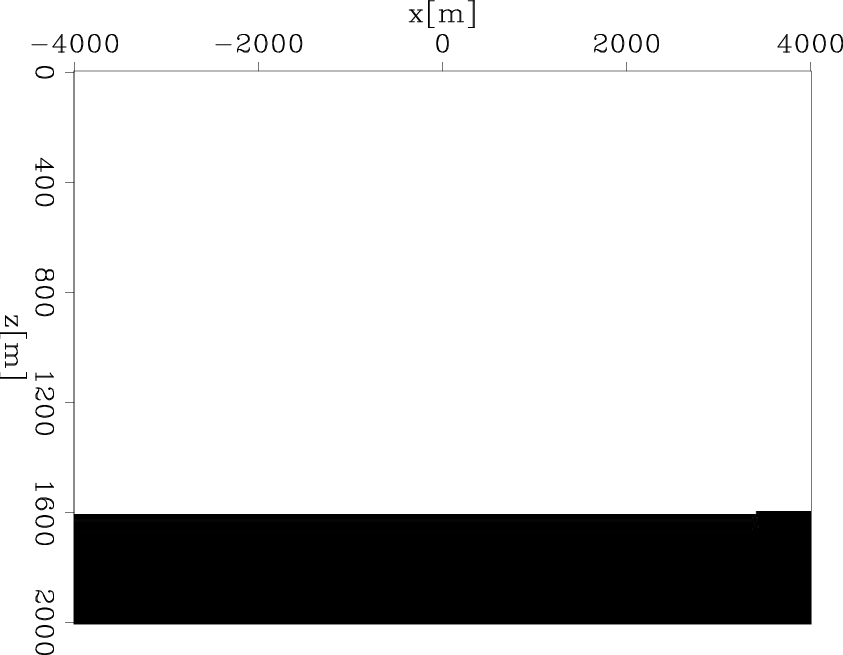
twin-slow
Figure 1. The correct slowness model. The slowness model consists of a constant background slowness ( |
|
|
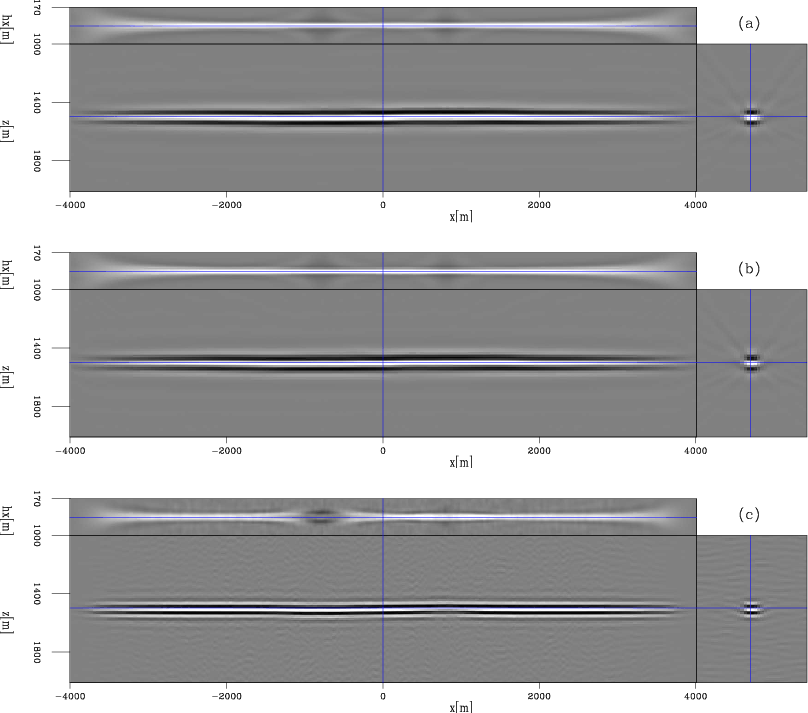
Figure 2 shows the migrated images in different domains computed with a background slowness
![]() s/m.
Figure 2(a) is obtained by migrating the original
s/m.
Figure 2(a) is obtained by migrating the original ![]() shot gathers. Because of the inaccuracy of the slowness model,
we can identify the mispositioning of the reflectors, especially beneath the Gaussian anomalies.
Figure 2(b) is obtained by migrating the data-space plane-wave encoded gathers, where
shot gathers. Because of the inaccuracy of the slowness model,
we can identify the mispositioning of the reflectors, especially beneath the Gaussian anomalies.
Figure 2(b) is obtained by migrating the data-space plane-wave encoded gathers, where ![]() plane waves are migrated;
the result is almost identical to that in Figure 2(a);
Figure 2(c) is obtained by migrating the image-space encoded gathers.
The image-space encoded areal source and receiver data are generated by simultaneously modeling
plane waves are migrated;
the result is almost identical to that in Figure 2(a);
Figure 2(c) is obtained by migrating the image-space encoded gathers.
The image-space encoded areal source and receiver data are generated by simultaneously modeling ![]() randomly encoded unfocused SODCIGs,
and
randomly encoded unfocused SODCIGs,
and ![]() realizations of the random sequence are used;
hence we have
realizations of the random sequence are used;
hence we have ![]() image-space encoded areal gathers (each realization contains
image-space encoded areal gathers (each realization contains ![]() areal shots).
The kinematics of the result look almost the same
as those in Figure 2(a). However, notice the wavelet squeezing effect
and the random noise in the background caused by the random phase encoding.
areal shots).
The kinematics of the result look almost the same
as those in Figure 2(a). However, notice the wavelet squeezing effect
and the random noise in the background caused by the random phase encoding.
|
|---|
|
twin-bimg-all
Figure 2. Migrated image cubes with a constant background slowness ( |
|
|
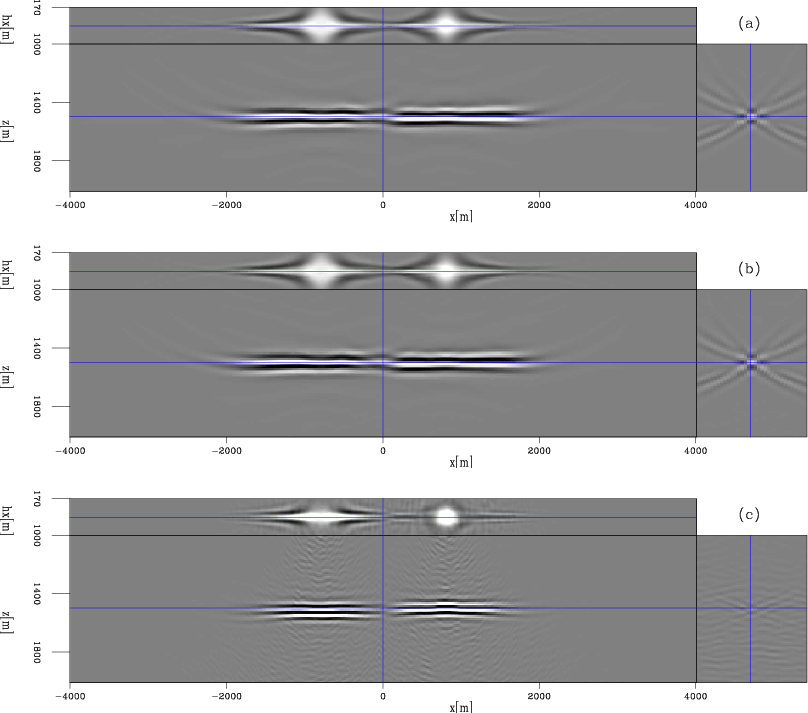
Figure 3 shows the image perturbations obtained by applying the forward tomographic operator ![]() in different domains.
For this example, we assume that we know the correct slowness perturbation
in different domains.
For this example, we assume that we know the correct slowness perturbation
![]() , which is obtained by subtracting the background slowness
, which is obtained by subtracting the background slowness
![]() from the correct slowness
from the correct slowness ![]() . Figure 3(a) shows the image perturbation computed with the original
. Figure 3(a) shows the image perturbation computed with the original ![]() shot gathers; notice the relative
shot gathers; notice the relative
![]() degree phase rotation compared to the background image shown in Figure 2(a). Figure 3(b) is the result
obtained by using
degree phase rotation compared to the background image shown in Figure 2(a). Figure 3(b) is the result
obtained by using ![]() data-space plane-wave encoded gathers; the result is almost identical to Figure 3(a).
Figure 3(c) shows the result computed with
data-space plane-wave encoded gathers; the result is almost identical to Figure 3(a).
Figure 3(c) shows the result computed with ![]() image-space encoded gathers; the kinematics are also similar to those in
Figure 3(a).
image-space encoded gathers; the kinematics are also similar to those in
Figure 3(a).
|
|---|
|
twin-dimg-all
Figure 3. The image perturbations obtained by applying the forward tomographic operator |
|
|
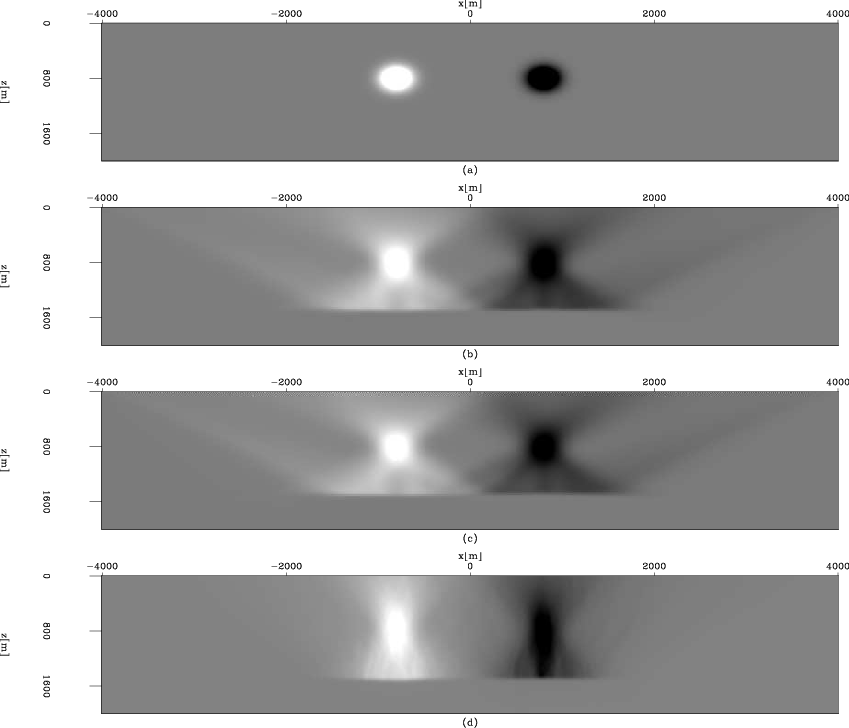
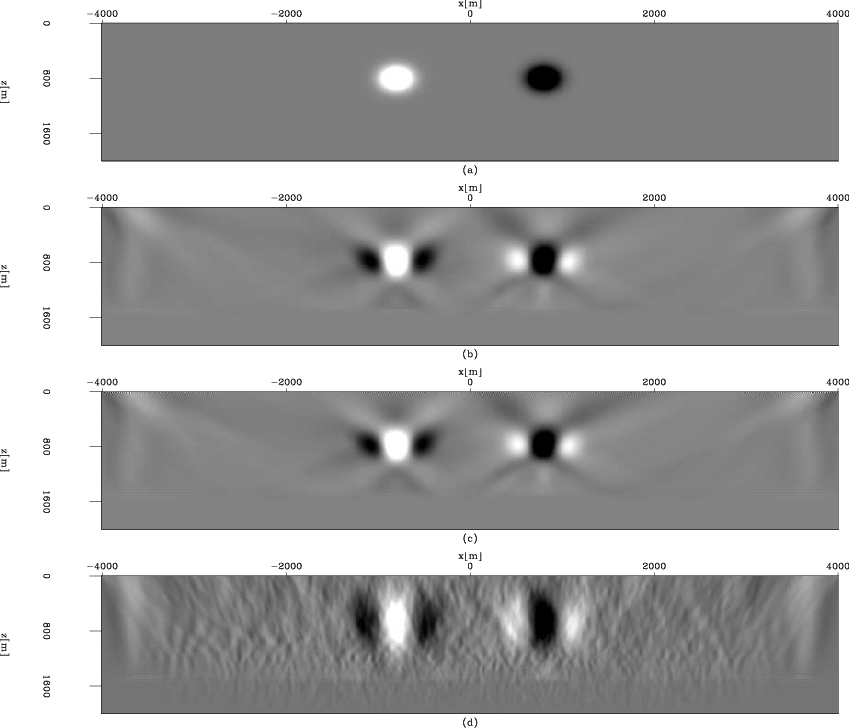
Figure 4 illustrates the predicted slowness perturbations by
applying the adjoint tomographic operator
![]() to the image perturbations obtained in Figure 3.
For comparison, Figure 4(a) shows the correct slowness perturbation, i.e.,
to the image perturbations obtained in Figure 3.
For comparison, Figure 4(a) shows the correct slowness perturbation, i.e.,
![]() ;
Figure 4(b) is the predicted slowness perturbation by back-projecting Figure 3(a) using all
;
Figure 4(b) is the predicted slowness perturbation by back-projecting Figure 3(a) using all ![]() shot gathers;
Figure 4(c) is the result by back-projecting Figure 3(b)
using all
shot gathers;
Figure 4(c) is the result by back-projecting Figure 3(b)
using all ![]() data-space plane-wave encoded gathers and is almost identical to
Figure 4(b); Figure 4(d) shows the result by back-projecting Figure 3(c)
using all
data-space plane-wave encoded gathers and is almost identical to
Figure 4(b); Figure 4(d) shows the result by back-projecting Figure 3(c)
using all ![]() image-space encoded gathers.
The result is also similar to Figure 4(b). However, notice that Figure 4(d) shows a slightly less focused result than
Figure 4(b) and (c), which might be caused by the unattenuated crosstalk and the pseudo-random noise
presented in Figure 3(c).
image-space encoded gathers.
The result is also similar to Figure 4(b). However, notice that Figure 4(d) shows a slightly less focused result than
Figure 4(b) and (c), which might be caused by the unattenuated crosstalk and the pseudo-random noise
presented in Figure 3(c).
|
|---|
|
twin-dslw-all
Figure 4. The slowness perturbation obtained by applying the adjoint tomographic operator |
|
|
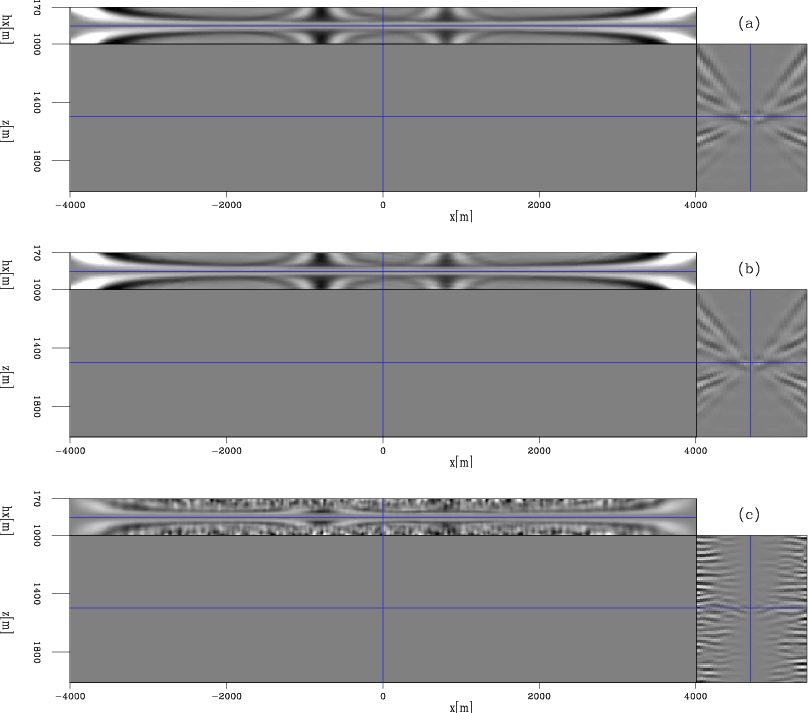
The final example we show is the comparison among the gradients of the objective functional obtained in different domains.
For simplicity, here we compare only the negative DSO gradients (
![]() ) defined by Equation 8
(we compare
) defined by Equation 8
(we compare
![]() instead of
instead of
![]() ,
because
,
because
![]() determines the search direction in a gradient-based nonlinear optimization algorithm).
Figure 5 shows the
DSO image perturbations computed as follows:
determines the search direction in a gradient-based nonlinear optimization algorithm).
Figure 5 shows the
DSO image perturbations computed as follows:
| (A-38) |
| (A-39) |
|
|---|
|
twin-dimg-offdso-all
Figure 5. The DSO image perturbations. The coherent energy at non-zero offsets indicates velocity errors. Panel (a) is obtained using the original shot gathers; Panels (b) and (c) are obtained using the data-space encoded gathers and the image-space encoded gathers, respectively. [CR] |
|
|
Figure 6 shows the negative gradients of the DSO objective functional (
![]() )
obtained by back-projecting the DSO image perturbations shown in
Figure 5.
For comparison, Figure 6(a) shows the exact slowness perturbation, which is the same
as Figure 4(a); Figure 6(b) shows the result obtained in the original shot-profile domain;
Figure 6(c) shows the result obtained in the data-space phase-encoding domain, which is almost identical to
Figure 6(b); Figure 6(d) shows the result obtained in the image-space phase-encoding domain.
The result is also similar to Figure 6(b), though the unattenuated crosstalk and the random noise make the gradient
less well behaved than those in Figure 6(b) and (c). Most important,
the gradient in Figure 6(d) is pointing towards the correct direction, which is crucial
for a gradient-based optimization algorithm to converge to the correct solution.
)
obtained by back-projecting the DSO image perturbations shown in
Figure 5.
For comparison, Figure 6(a) shows the exact slowness perturbation, which is the same
as Figure 4(a); Figure 6(b) shows the result obtained in the original shot-profile domain;
Figure 6(c) shows the result obtained in the data-space phase-encoding domain, which is almost identical to
Figure 6(b); Figure 6(d) shows the result obtained in the image-space phase-encoding domain.
The result is also similar to Figure 6(b), though the unattenuated crosstalk and the random noise make the gradient
less well behaved than those in Figure 6(b) and (c). Most important,
the gradient in Figure 6(d) is pointing towards the correct direction, which is crucial
for a gradient-based optimization algorithm to converge to the correct solution.
|
|---|
|
twin-dslw-offdso-all
Figure 6. The negative DSO gradients obtained using different methods. Panel (a) shows the exact slowness perurbation; Panel (b) shows the result obtained using the original shot gathers; Panels (c) and (d) show the results obtained using the data-space phase encoded gathers and the image-space phase encoded gathers, respectively. [CR] |
|
|
|
|
|
|
Image-space wave-equation tomography in the generalized source domain |