|
|
|
|
Early-arrival waveform inversion for near-surface velocity and anisotropic parameters: modeling and sensitivity kernel analysis |
 . However, to avoid higher-order term involving both variables, equation 1 can be rewritten as follows:
. However, to avoid higher-order term involving both variables, equation 1 can be rewritten as follows:
 and
and
 are the two model variables, assuming
are the two model variables, assuming
 is the sensitivity kernel, and
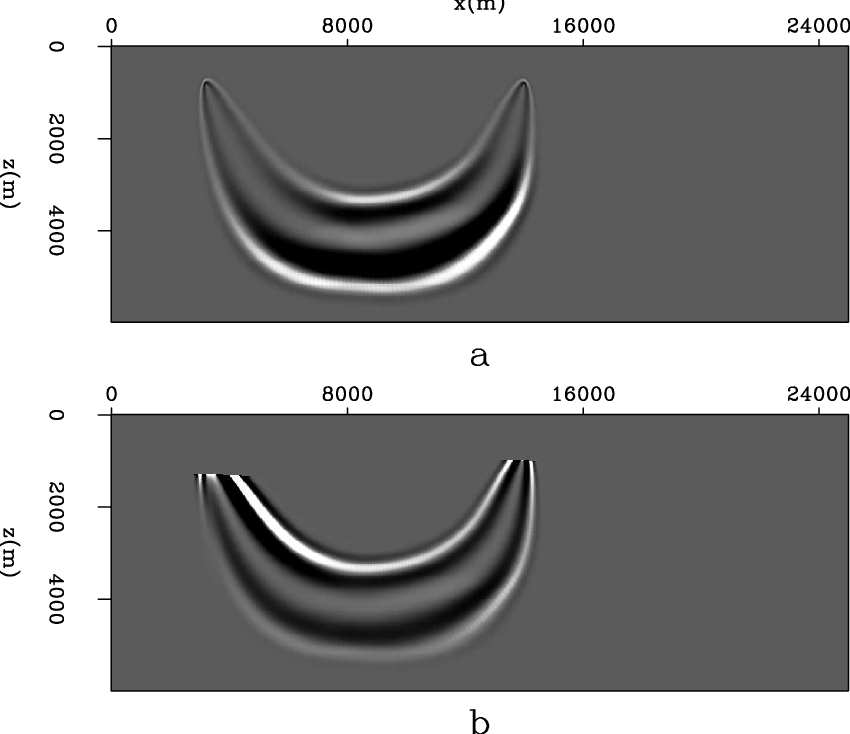
is the sensitivity kernel, and  is the relative sensitivity kernel. the clipping value of the top figure is over sixteen orders of magnitude larger than the bottom figure, which means if we are to use this parametrization for our inversion, there will be almost no updates of the anisotropic parameter.
is the relative sensitivity kernel. the clipping value of the top figure is over sixteen orders of magnitude larger than the bottom figure, which means if we are to use this parametrization for our inversion, there will be almost no updates of the anisotropic parameter.
|
|---|
|
relimpn
Figure 5. Relative sensitivity kernel of parameter: a)  ; b)
; b)
 . Clipping value of the top figure is
. Clipping value of the top figure is  , clipping value of the bottom figure is
, clipping value of the bottom figure is  .
.
|
|
|
|
|
|
|
Early-arrival waveform inversion for near-surface velocity and anisotropic parameters: modeling and sensitivity kernel analysis |