 |
 |
 |
 | Residual moveout-based wave-equation migration velocity analysis in 3-D |  |
![[pdf]](icons/pdf.png) |
Next: Gaussian anomaly example
Up: 3-D RMO WEMVA method
Previous: 2-D Theory Review
As we shift from 2-D seismic surveys to 3-D ones, two extra dimensions (cross-line axis  and subsurface azimuth
and subsurface azimuth  ) are added to our seismic image. Therefore we denote the prestack image as
) are added to our seismic image. Therefore we denote the prestack image as
 . Assuming there are
. Assuming there are  values for
, then
values for
, then
 .
Now the maximum-stack-power objective function 1 can be generalized to
.
Now the maximum-stack-power objective function 1 can be generalized to
![$\displaystyle J(s) = \frac{1}{2} \sum_{x,y}\sum_{z} {\left[\sum_{\phi_i} \sum_{\gamma} \; I(z,\gamma,\phi_i,x,y;s) \right]}^2,$](img64.png) |
(11) |
in which we stack the gather along both  and
axes.
and
axes.
The next step is to choose a proper residual moveout parameterization for the 3-D ADCIGs, in which the moveout is a surface (defined by
 ) rather than a curve (of
). There are certainly more than one way to design such parameterization.
As an initial attempt, we choose a straightforward approach, in which we separate the moveout surface into individual curves by azimuth
. For each azimuth angle
) rather than a curve (of
). There are certainly more than one way to design such parameterization.
As an initial attempt, we choose a straightforward approach, in which we separate the moveout surface into individual curves by azimuth
. For each azimuth angle  , we assign the curvature parameter
, we assign the curvature parameter  and the static shift parameter
and the static shift parameter  , respectively.
Notice that all the curves share the same
parameter, because the center of the move-out surface at (
, respectively.
Notice that all the curves share the same
parameter, because the center of the move-out surface at (
 ) is shared by all curves.
) is shared by all curves.
Under this parameterization, the 3-D counterpart of objective function 3 would be
 |
(12) |
where
 becomes a vector,
becomes a vector,
 . The gradient formula 4 now turns into
. The gradient formula 4 now turns into
 |
(13) |
Because each
is treated separately, we can compute
 in exactly the same way as we do in the 2-D case.
in exactly the same way as we do in the 2-D case.
Analogously, we can define an auxiliary objective function for each image point that uncovers the
 relationship:
relationship:
 |
(14) |
Using the same trick of finding partial derivatives for implicit functions, equation 6 is generalized as
 |
(15) |
We differentiate equation 15 with respect to  :
:
 |
(16) |
We can calculate the  by
Jacobian matrix elements and the right-hand side based on equation 14:
by
Jacobian matrix elements and the right-hand side based on equation 14:
Denoting matrix
 to be the inverse of the Jacobian, then
to be the inverse of the Jacobian, then
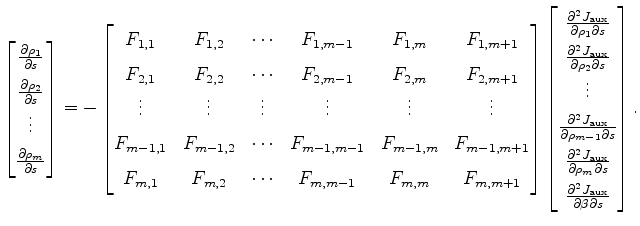 |
(18) |
Finally, plugging equation 18 and 17 back into the model gradient expression 13, we get
 |
(19) |
in which
 |
(20) |
In practice, there are some caveats when taking the inverse of the Jacobian matrix. The Jacobian can be ill-conditioned when all elements in one row or column are close to zero.
For example, if the image point is not illuminated from a certain azimuth direction  , i.e.
, i.e.
 , then the
, then the  row and column of the Jacobian would be zero.
In order to avoid numerical overflow under this circumstance, we pre-exclude those azimuth angles with poor illumination energy from the Jacobian, and we invert a subset of the original Jacobian that contains only image gathers at well-illuminated azimuth angles.
row and column of the Jacobian would be zero.
In order to avoid numerical overflow under this circumstance, we pre-exclude those azimuth angles with poor illumination energy from the Jacobian, and we invert a subset of the original Jacobian that contains only image gathers at well-illuminated azimuth angles.
|
|
|
|
| Residual moveout-based wave-equation migration velocity analysis in 3-D | |
|
Next: Gaussian anomaly example
Up: 3-D RMO WEMVA method
Previous: 2-D Theory Review
2012-05-10











