|
|
|
|
VTI migration velocity analysis using RTM |
 alone. In this test,
we model the synthetic data using very smooth
(Figure 4(a)) and
alone. In this test,
we model the synthetic data using very smooth
(Figure 4(a)) and  (Figure 4(b)) models as suggested by many field applications. To better
constrain the inversion for
, we also increase the maximum offset in the acquisition to 6 km.
(Figure 4(b)) models as suggested by many field applications. To better
constrain the inversion for
, we also increase the maximum offset in the acquisition to 6 km.
Compared with the true
model, our initial
model (Figure 5(a)) has
negative perturbation of about 50% in the shallower part. Because a perfect velocity model is used
in this case, the moveout at large angles is so small that it is almost
undetectable to human eyes (Figure 5(b)). However,
our inversion scheme is very sensitive to the residual moveout and successfully updates
the
model in the correct direction. Figure 6 shows the
inverted
model and the corresponding angle-domain common-image gathers
after 40 iterations. Comparing with the initial angle gathers (Figure 5(b)), we can
see that the slightly curving events at large angles are flattened and
the inverted
model is closer to the true one.
|
|---|
|
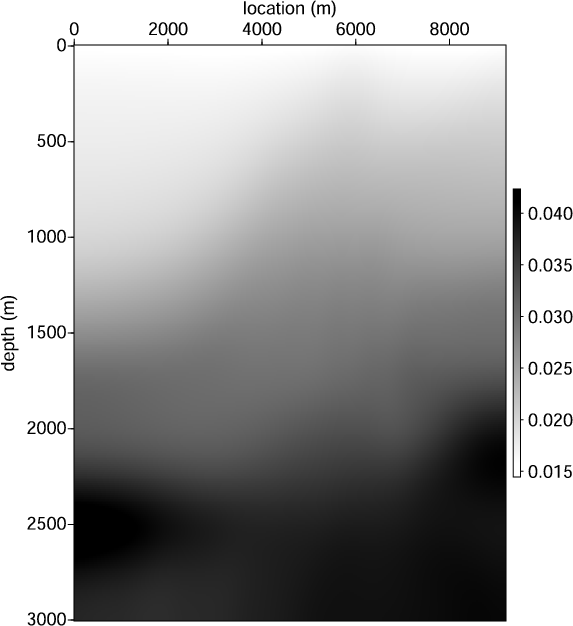
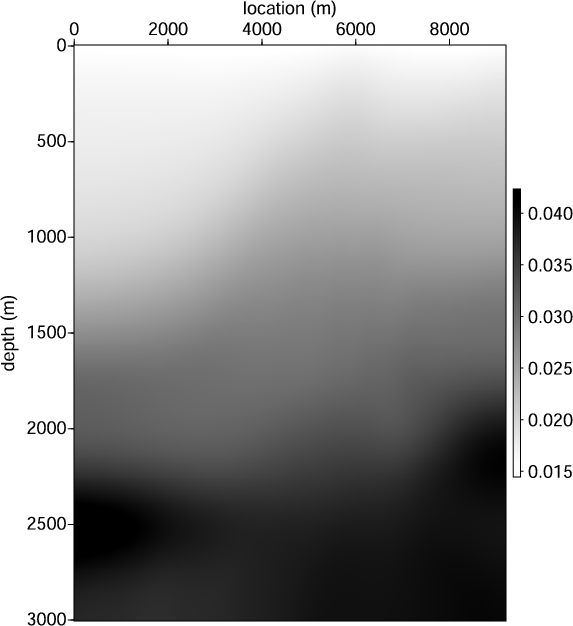
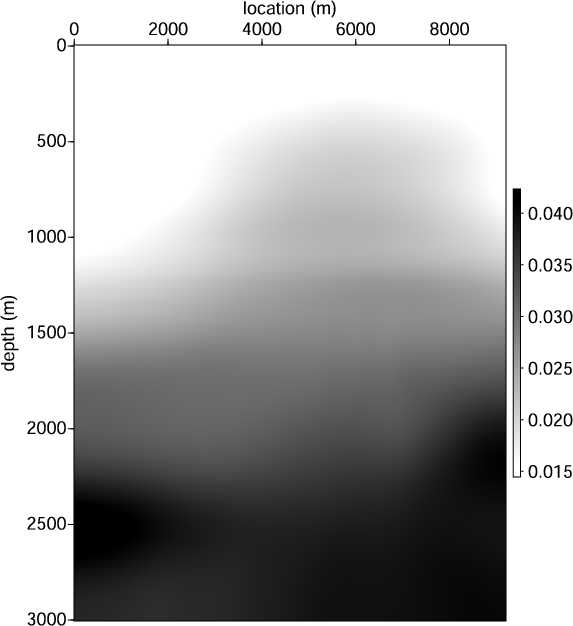
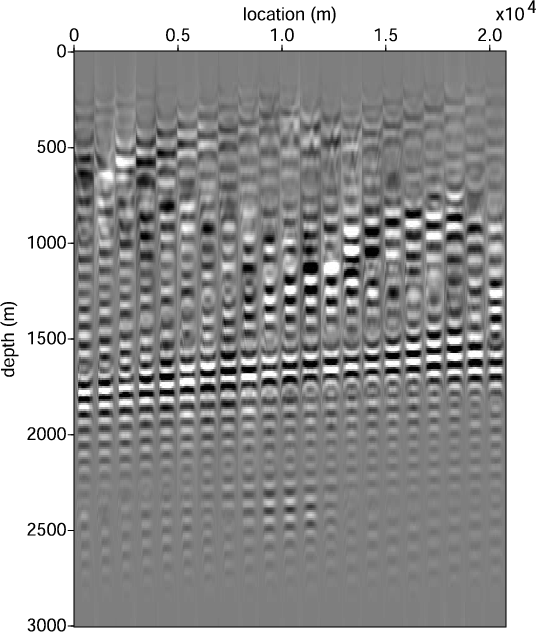
epssm,dltsm
Figure 4. (a) True
model and (b) true
model used to generate the synthetic data.
|
|
|
|
|---|
|
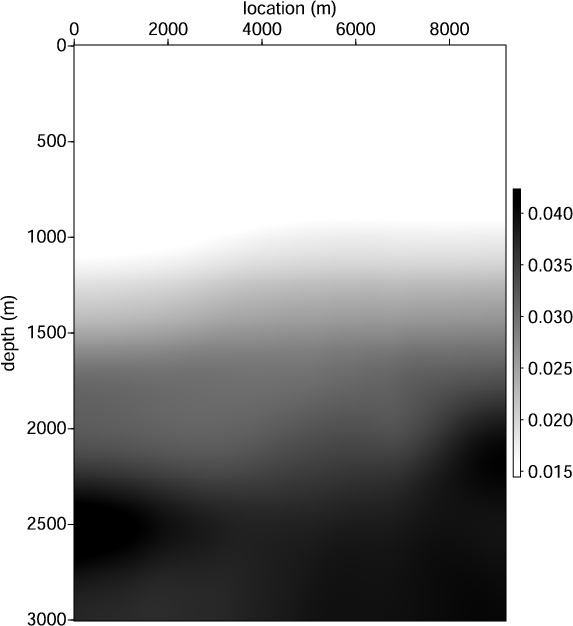
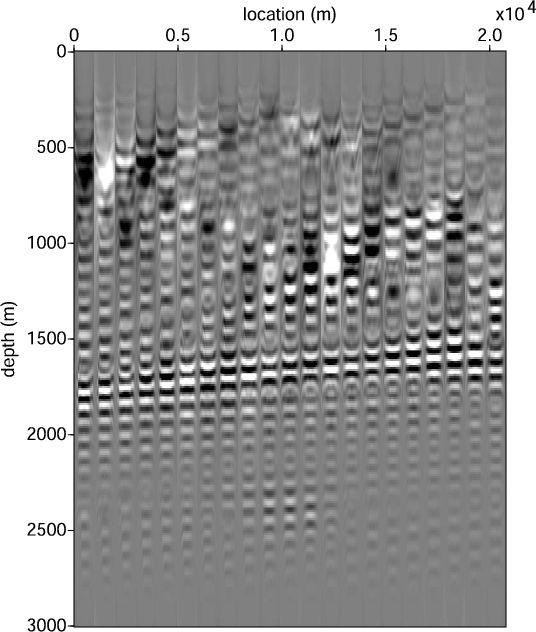
initeps,init-e-image
Figure 5. (a) Initial
model and (b) initial angle-domain
common-image gathers using initial
model. Gathers are taken at every 10 common image point from  km to
km to  km.
km.
|
|
|
|
|---|
|
inveps,inv-e-image
Figure 6. (a) Inverted
model and (b) final angle-domain
common-image gathers using inverted
model in (a). Compared with Figure 5(b), panel (b) shows more even
energy across different angles. Gathers are taken at every 10 common image point from
km to
km.
|
|
|
|
|
|
|
VTI migration velocity analysis using RTM |