|
|
|
|
Geophysical applications of a novel and robust L1 solver |
| (7) |
| (8) |
 is interval velocity,
is interval velocity, Thus we can formulate the Dix inversion problem as follows:
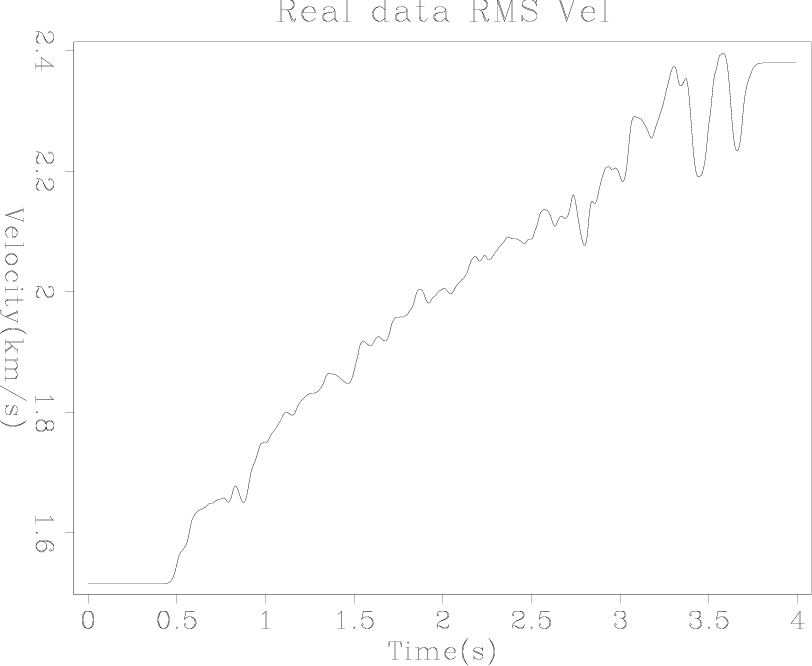
The input RMS velocity with 1000 samples is shown in Figure 1. It is obvious that the violent variation at the end of the trace is not realistic. Thus, we use the hybrid-norm to ignore the large residuals in the data-fitting, which are considered to be noise. At the same time, to obtain a blocky interval velocity model, the large residual in the derivative of the interval velocity should be ``invisible'' to the measure. Therefore, the hybrid norm on the model styling appear to be the best choice.
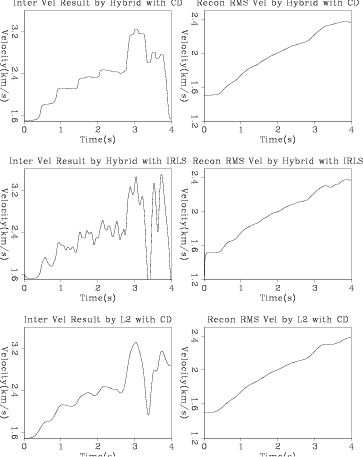
To compare the inversion result, we also use the IRLS and L2 solver on the same data with comparable parameters. The inversion results are shown in Figure 2. The left column is the inverted interval velocity, while the right column is the corresponding reconstructed RMS velocity. The result shows that compared with the IRLS and L2 result, the hybrid solver successfully retrieved the most blocky velocity model, and the corresponding reconstructed RMS velocity contains less noise while keeping the trend of the original data.
|
input-dix-real
Figure 1. Input 1-D RMS velocity. |
|
|---|---|
|
|
|
|---|
|
dix-real
Figure 2. Comparison of the inversion results. Panels in the left column are the estimated interval velocity, while panels on the right are the corresponding reconstructed RMS velocity. Top panels: results of the hybrid with CD; Middle panels: results of the hybrid with IRLS; Bottom panels: results of the L2 norm with CD. Notice that although the reconstructed RMS velocity from the three methods are more or less the same, the interval velocity from hybrid CD is more blocky then the other two. |
|
|
|
|
|
|
Geophysical applications of a novel and robust L1 solver |