Next: Surfaces
Up: Updates
Previous: Rotation
Picking every X-Y location is too human-intensive to be practical. As a result,
auto-pickers are used to speed up what is still a human-intensive task. Hypercube
has two 2-D auto picking options. Both of these options use a dynamic programming Liner and Clapp (2004)
approach to find the most likely path between a set of user picked points. The difference
between the two approach is how the dynamic programming score matrix is constructed.
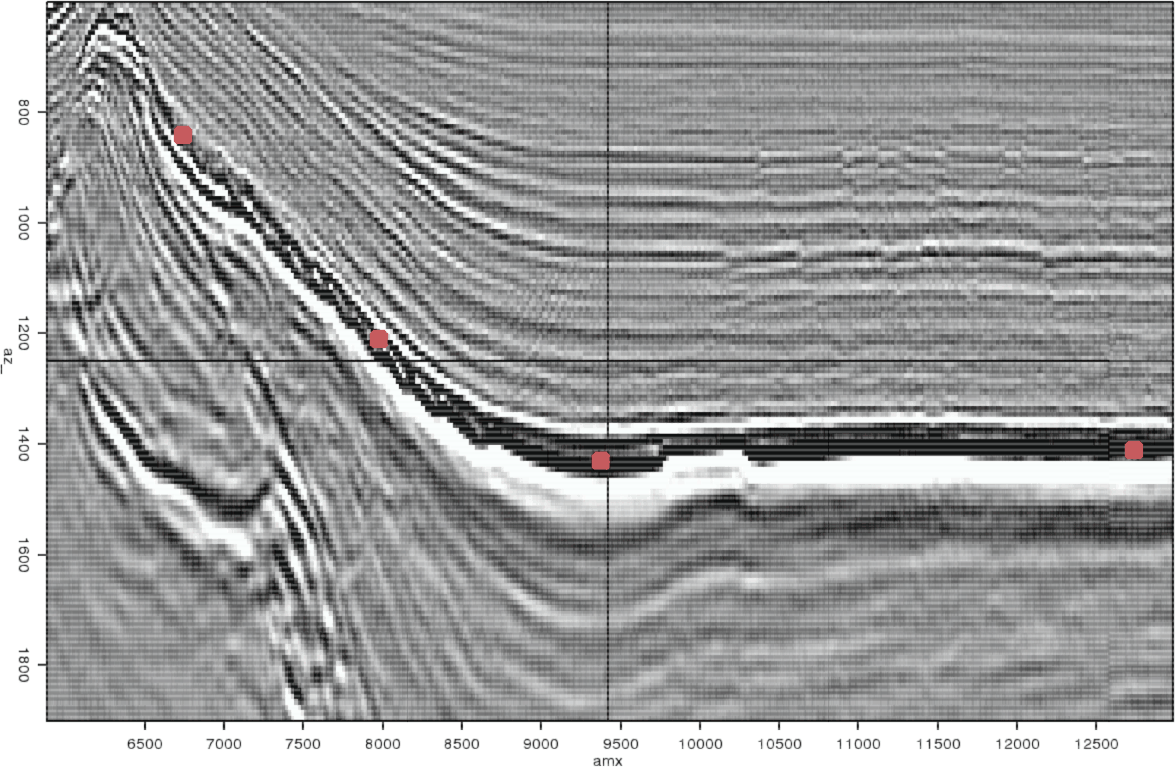
The user begins by selected several points along a given interface (Figure 2(a)).Hypercube has
the concept of a single axis for each pick set. The best way to understand
the single axis is through a couple examples. When picking NMO velocities you do
not want more than one velocity at a given time and midpoint. As a result, the velocity
axis would be the single axis. When picking surfaces, Hypercube forces you to pick
an axis (such as depth) where you will not have multiple depths at any given location.
|
|---|
pick,auto
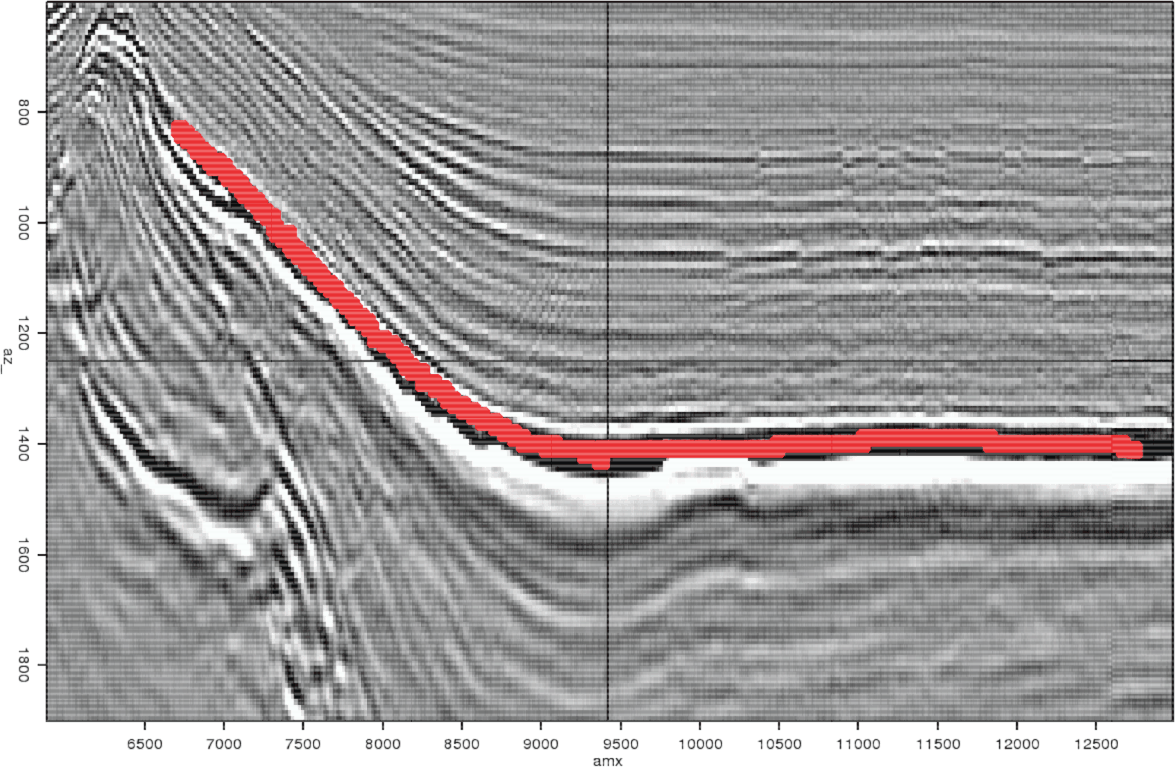
Figure 2. a) Several picks on an inline section. b) The result of using the modified Brown auto-picker on the picks shown in a).
|
|---|
![[pdf]](icons/pdf.png) ![[png]](icons/viewmag.png)
|
|---|
The definition of a single axis allows the viewer
viewer to construct a linear path between pairs of user specified points (the linear
path is along the non-single axis). Points are then extracted by taking points that
are to either side (along the single axis) of the line segments making
a 2-D matrix. The 2-D matrix is as wide as the distance between the first
and last picked points along the non-single axis and is as high as  ,
where
,
where  is the user specified number of points to either of the line segment
that are extracted. At this stage
the two auto-picking approaches (correlation Viteribi and Brown) diverge. In the
correlation approach, the score matrix is constructed by cross correlating a vector at
a picked location with the vector at the test location. The Brown method (Brown et al., 2006) substitutes
amplitude for velocity and uses an Eikonal solver to find the best path between
picked points. Figure 2(b) demonstrates the result of running the Brown auto-picker
on the picks shown in Figure 2(a).
is the user specified number of points to either of the line segment
that are extracted. At this stage
the two auto-picking approaches (correlation Viteribi and Brown) diverge. In the
correlation approach, the score matrix is constructed by cross correlating a vector at
a picked location with the vector at the test location. The Brown method (Brown et al., 2006) substitutes
amplitude for velocity and uses an Eikonal solver to find the best path between
picked points. Figure 2(b) demonstrates the result of running the Brown auto-picker
on the picks shown in Figure 2(a).
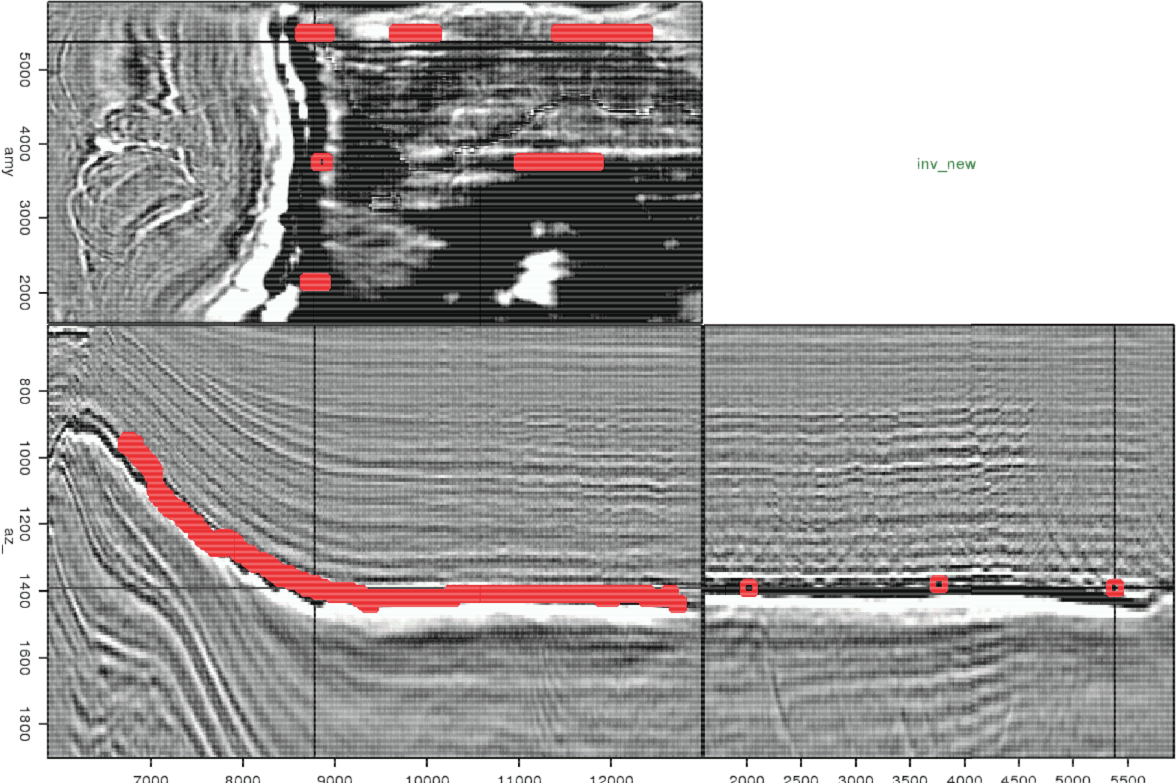
The auto-picker provides some level of 3-D picking through extending a series of
2-D picked lines. Figure 3 show the
result of auto-picking three in-lines. The auto picker will loop through the planes perpendicular
to picked lines using the specified auto-picking methods to create a dense
pick-set. The left panel of Figure 4 shows the result of extending
a series of picked lines.
multi
Figure 3. The result of picking two additional inline using
the auto-pickers.
|
|
|
|
|---|
Next: Surfaces
Up: Updates
Previous: Rotation
2010-05-19