|
|
|
|
Blocky velocity inversion by hybrid norm |
|
|---|
|
elf0
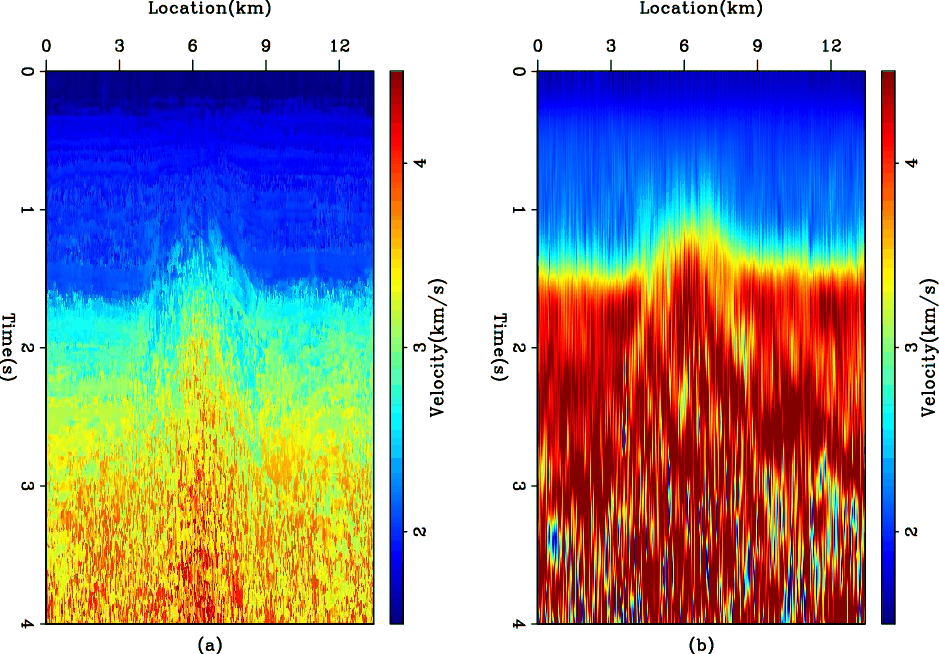
Figure 11. The ELF dataset. (a) The input RMS velocity which is automatically picked from the CMP gathers. (b) The interval velocity by direct Dix conversion. |
|
|
|
elf-weight
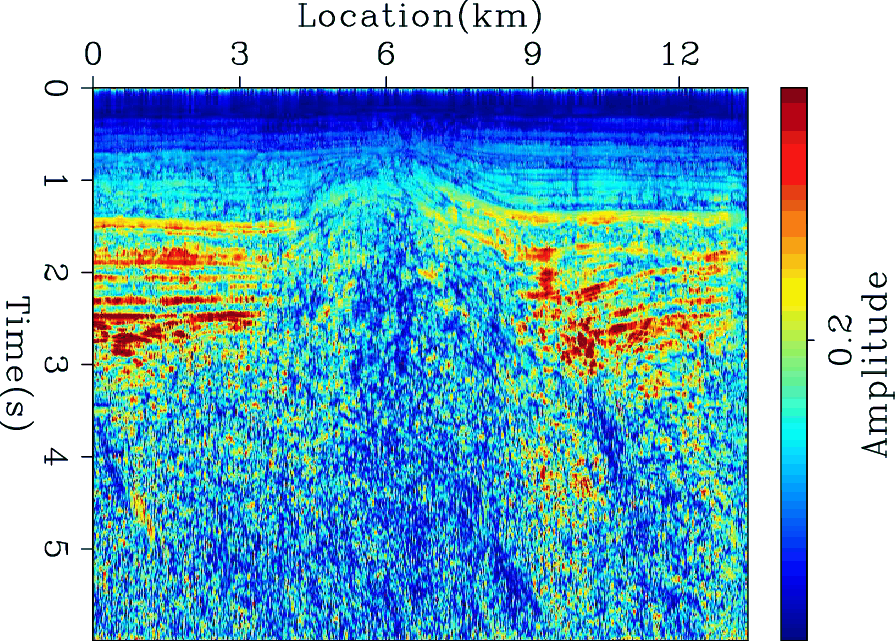
Figure 12. The strength of the picks in the velocity scan of ELF dataset, which is used as the weight before dividing by time. |
|
|---|---|
|
|
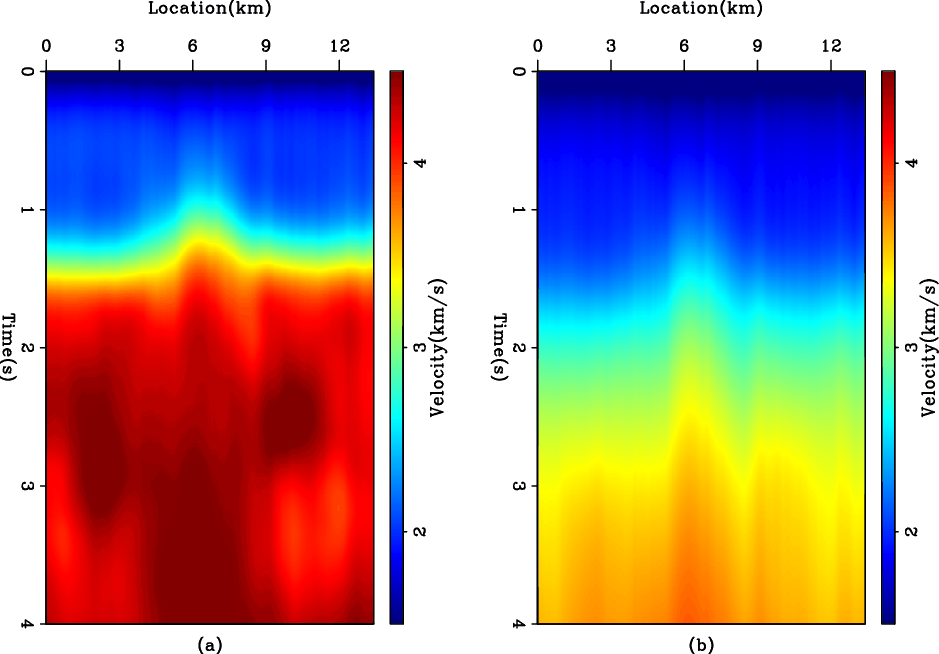
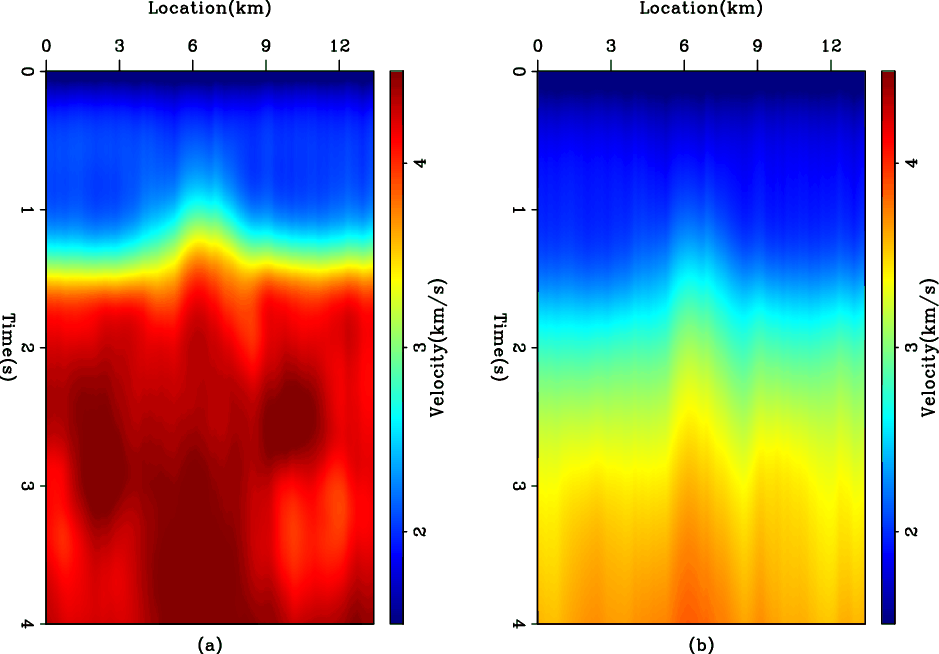
For this dataset, we will only repeat the last two regularizations, which are the first derivative in two and four directions, since they showed the best results with the most symmetric blockiness. Figure 13 shows the results of regularizing in two directions in the ![]() norm and Figure 14 shows the results of the same regularization in the hybrid norm. Figures 15 and 16 show the results of using four-direction regularization.
norm and Figure 14 shows the results of the same regularization in the hybrid norm. Figures 15 and 16 show the results of using four-direction regularization.
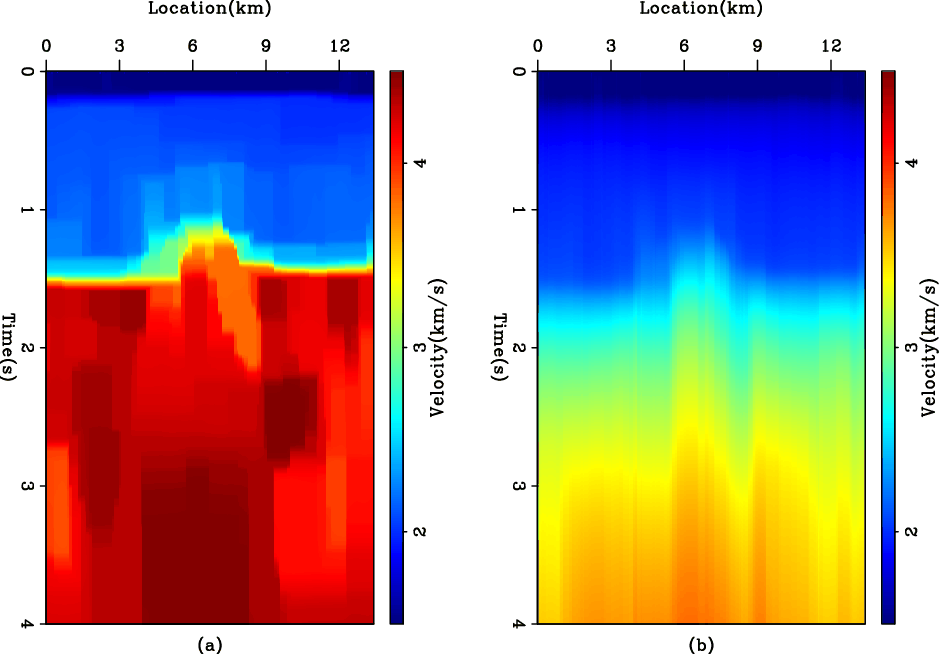
Since the dataset is larger with smaller sampling, the improvement of using more directions is evident. Forcing the inversion to pick between two directions has an apparent effect of reducing the resolution. One obvious example is the chalk layer, which looks very horizontal in Figure 14 but more detailed in Figure 16. In all cases, ![]() always gives smooth results, which smear the model and lower the resolution of the inversion.
always gives smooth results, which smear the model and lower the resolution of the inversion.
|
|---|
|
l2-elf14
Figure 13. The ELF dataset. (a) The interval velocity estimated by using the first derivative operator in two directions as a regularization in the |
|
|
|
|---|
|
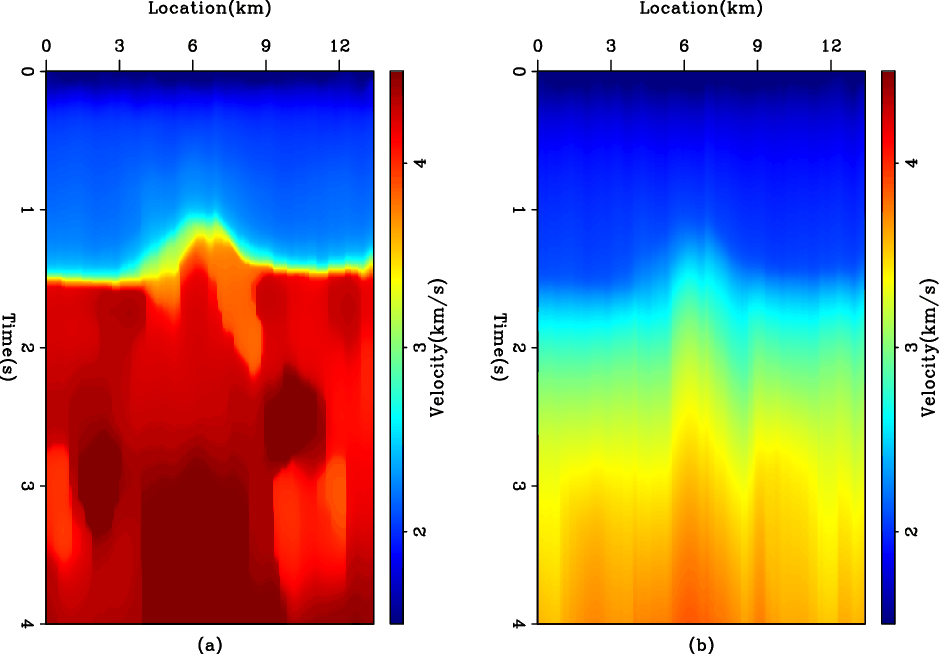
hbe-elf17
Figure 14. The ELF dataset. (a) The interval velocity estimated by using the first derivative operator in two directions as a regularization in the hybrid norm. (b) The reconstructed RMS velocity. |
|
|
|
|---|
|
l2-elf23
Figure 15. The ELF dataset. (a) The interval velocity estimated by using the first derivative operator in four directions as a regularization in the |
|
|
|
|---|
|
hbe-elf29
Figure 16. The ELF dataset. (a) The interval velocity estimated by using the first derivative operator in four directions as a regularization in the hybrid norm. (b) The reconstructed RMS velocity. |
|
|
|
|
|
|
Blocky velocity inversion by hybrid norm |