A Cartesian coordinate system
can be defined from a
unit square
by
(12)
The partial differential transformation matrix is
(13)
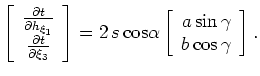
leading to the following differential travel-time equations
(14)
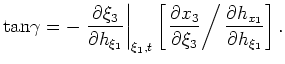
The Cartesian ADCIG computation is given by
(15)
Note that where the axes are equally sampled, one recovers the correct
reflection opening angle; situations where the axes are not equally
sampled require an additional scaling. This stretch is usually taken
into account during the Fourier transformation implicit in
equation 7.
Angle-domain common-image gathers in generalized coordinates
 by
by
![$\displaystyle \left[ \begin{array}{c}
x_1\\
x_3
\end{array} \right] =
\left[ \...
...\end{array}\right]
\left[ \begin{array}{c}
\xi_1 \\
\xi_3
\end{array} \right].$](img40.png)
![$\displaystyle \left[ \begin{array}{cc}
\frac{\partial x_1}{\partial \xi_1}& \fr...
...d{array} \right] =
\left[ \begin{array}{cc}
a & 0 \\
0 & b
\end{array}\right],$](img41.png)
![$\displaystyle \left[ \begin{array}{c}
\frac{\partial t}{\partial h_{\xi_1}}\\
...
...}{c}
a \, {\rm sin} \, \gamma \\
b \, {\rm cos} \, \gamma
\end{array} \right].$](img42.png)