|
|
|
|
Geophysical data integration and its application to seismic tomography |
| (2) |
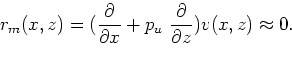
 is a convolution operator with a 2-D filter based on the local dip, and
is a convolution operator with a 2-D filter based on the local dip, and | (3) |
Note that the structural similarity measures do not include any physical link that might potentially exist between two fields. In other words, these functions only help the model-shaping part of optimization, and the physics of estimation lies in the data-misfit term with the mapping operator.
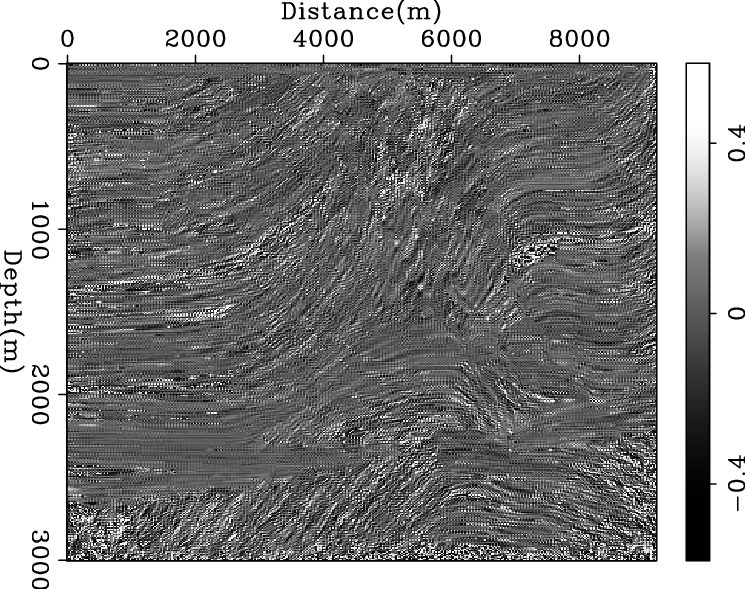
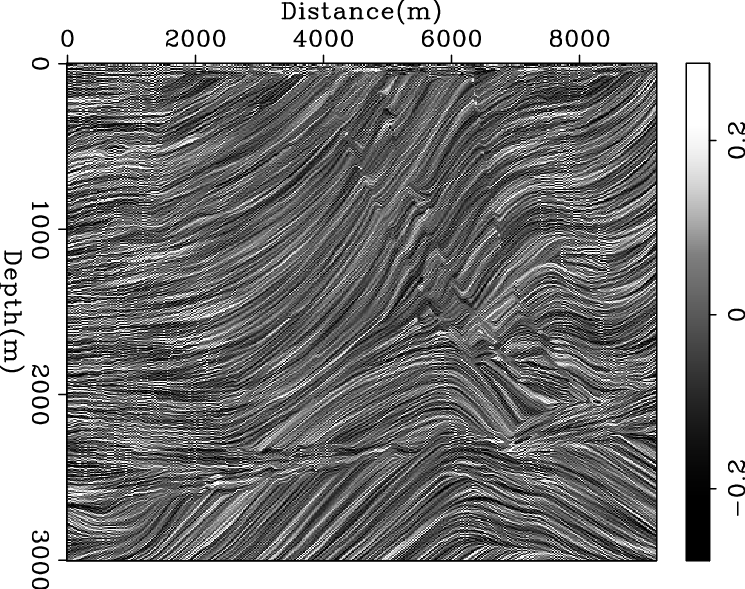
Figures 1 and 2 show examples where the reflectivity of the Marmousi synthetic model is used as auxiliary data to impose the geophysical structures on a random noise field and a smooth velocity field. The optimization problem used to generate the estimated model shown by Figures 1 and 2 is given by
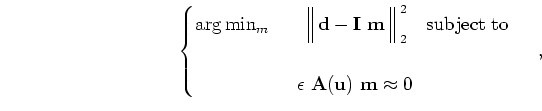 is identity matrix;
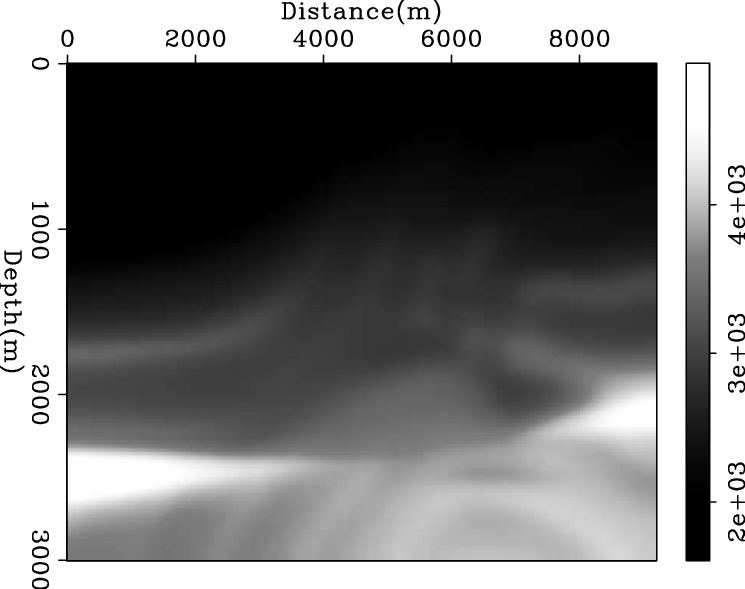
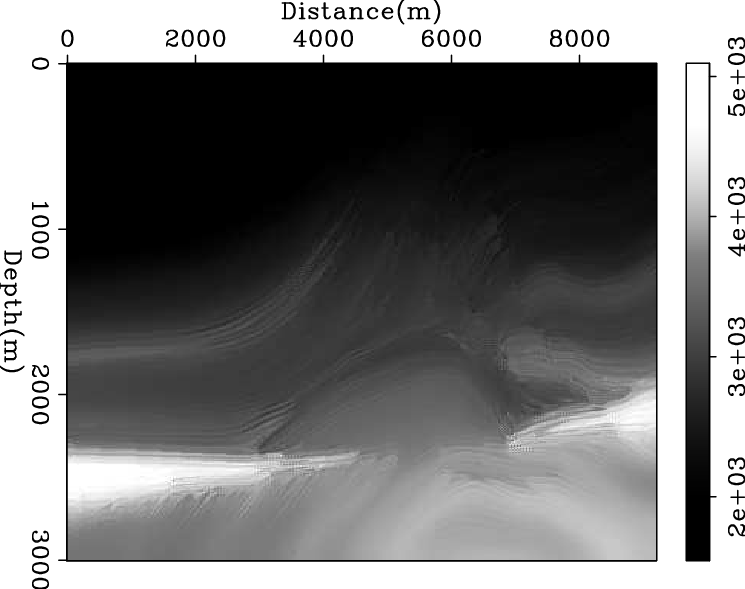
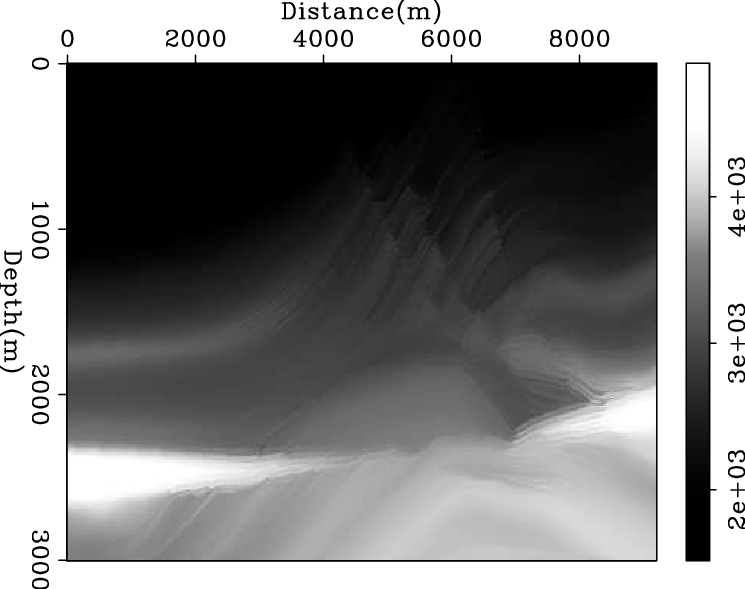
is identity matrix; Figure 2 shows a similar problem where we start with a smooth velocity of the Marmousi model instead of noise. Similarly, Figure 2(d) suggests that the dip residual technique leads to a less noisy partial reconstruction of the Marmousi structure; but not all the details are included. However, some of the horizontal parts of structures are reconstructed by the cross-gradient function (Figure 2(c)), but not with the dip residual (Figure 2(d)). Note that frequency ranges in smooth velocity and reflectivity are low and high, respectively.
|
|---|
|
noise,ref,nxrx,nxrp
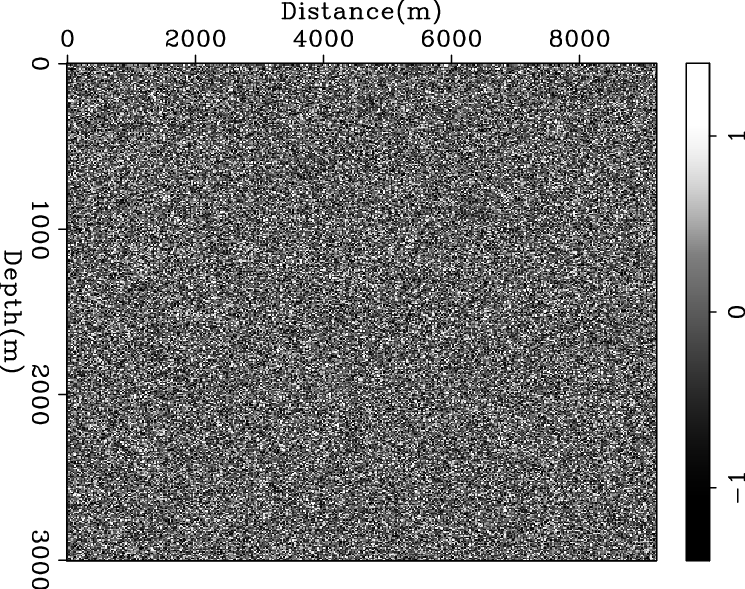
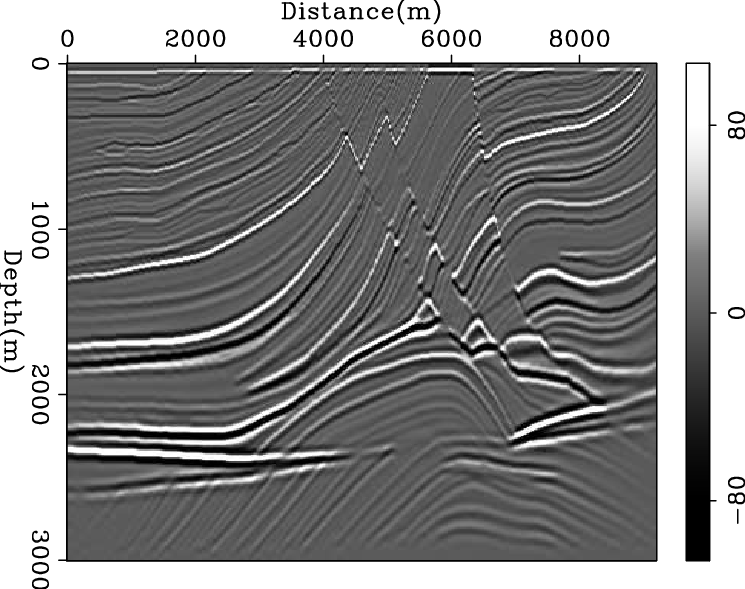
Figure 1. Data integration problem 1: The starting model is random noise (a) and the auxiliary data is the reflectivity of the Marmousi model (b). Panel (c) shows the estimated model with the cross-gradient function and panel (d) shows the estimated model with the dip residual. Note the reconstruction of the structure in the estimated models and how each method provides different quality of reconstruction. [ER] |
|
|
|
|---|
|
vs,ref,mxrx,mxrp
Figure 2. Data integration problem 2: The starting model is now changed to a smooth version of velocity (a) and the auxiliary data is the reflectivity of the Marmousi model (b) . Next panels show the estimated model with (c) the cross-gradient function and (d) dip residual. Note that we only expect to reconstruct the structure of the model, and the formulation of our optimization problems does not include the physics behind the wave propagation. [ER] |
|
|
|
|
|
|
Geophysical data integration and its application to seismic tomography |