|
|
|
|
Enhanced interpreter-aided salt-boundary extraction using shape deformation |
We represent the known contour on the template image as a set of landmark points,
 where
where
 (in 2-D Cartesian coordinates). Wang et al. (2001) describe the skeleton of this algorithm as follows:
(in 2-D Cartesian coordinates). Wang et al. (2001) describe the skeleton of this algorithm as follows:
``For each landmark, the proposed method first identifies a set of possible corresponding landmark points
on the input image, where
. Then conceptually the deformation is solved in two major steps:
 from the landmark set
from the landmark set  such that
such that
 is located in or near the true object boundary in the input image.
is located in or near the true object boundary in the input image.
 to match
to match  while keeping the general shape characteristics of
. ''
while keeping the general shape characteristics of
. ''
|
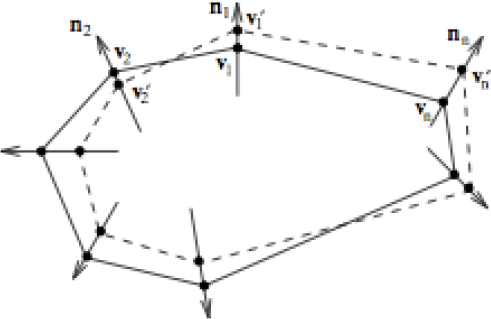
Fig2-deform
Figure 2. Landmark-based shape deformation, from Wang et al. (2001). |
|
|---|---|
|
|
For the first step, we search the candidate points in set
along a short line segment that centers around point
and aligns to the contour’s normal direction
 .
It is difficult to determine the best landmark point
from all candidates in
at the first try. Therefore, we just choose randomly an element in each
to form the initial set
and iterate this selection process a few times. During each iteration, we update the set
such that
more likely contains the correct corresponding landmarks.
.
It is difficult to determine the best landmark point
from all candidates in
at the first try. Therefore, we just choose randomly an element in each
to form the initial set
and iterate this selection process a few times. During each iteration, we update the set
such that
more likely contains the correct corresponding landmarks.
The next deformation step is formulated by finding the optimal solution to an objective function which takes into account both the goal of deforming the points in
into the current landmark set
and the goal of preserving the prior shape
(using the bending-energy formula from (Bookstein, 1989)). The optimization goal is
 defines the deformation from
to
as a mapping; i.e.
defines the deformation from
to
as a mapping; i.e.
 . Function
. Function  describes the term that penalizes the mismatch between
(the landmarks we found on the input image) and the mapping defined by
describes the term that penalizes the mismatch between
(the landmarks we found on the input image) and the mapping defined by
 .
The
term corresponds to the first goal, deforming the landmarks in set
to those in
. Function
.
The
term corresponds to the first goal, deforming the landmarks in set
to those in
. Function
 is a regularization term that tries to force the mapping
to be smooth, in other words, preserving the global shape information of the original
.
We add a
is a regularization term that tries to force the mapping
to be smooth, in other words, preserving the global shape information of the original
.
We add a  parameter to balance the weights of the two terms, Q and
parameter to balance the weights of the two terms, Q and  . The choice of
is up to the user's judgment. After mathematical simplification, this optimization can be solved easily using the classical SVM(Support Vector Machine) regression technique (as a quadratic programming problem of size
. The choice of
is up to the user's judgment. After mathematical simplification, this optimization can be solved easily using the classical SVM(Support Vector Machine) regression technique (as a quadratic programming problem of size  ). Moreover, the badly fitted components in set
are identified as the support-vectors. We update the set
by replacing those support-vectors with other candidates in
, such that the new set
would achieve better fitting.
). Moreover, the badly fitted components in set
are identified as the support-vectors. We update the set
by replacing those support-vectors with other candidates in
, such that the new set
would achieve better fitting.
|
|
|
|
Enhanced interpreter-aided salt-boundary extraction using shape deformation |