|
|
|
|
An approximation of the inverse Ricker wavelet as an initial guess for bidirectional deconvolution |
|
|---|
|
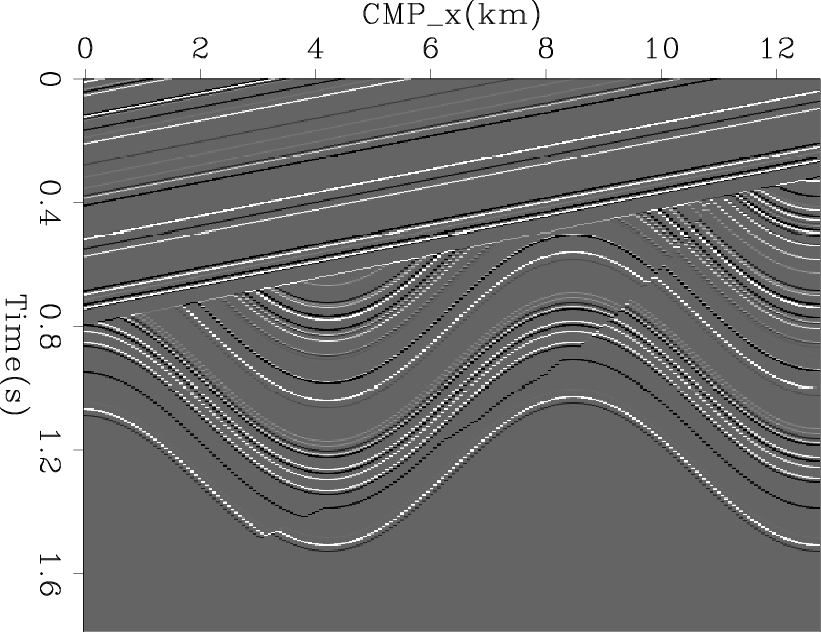
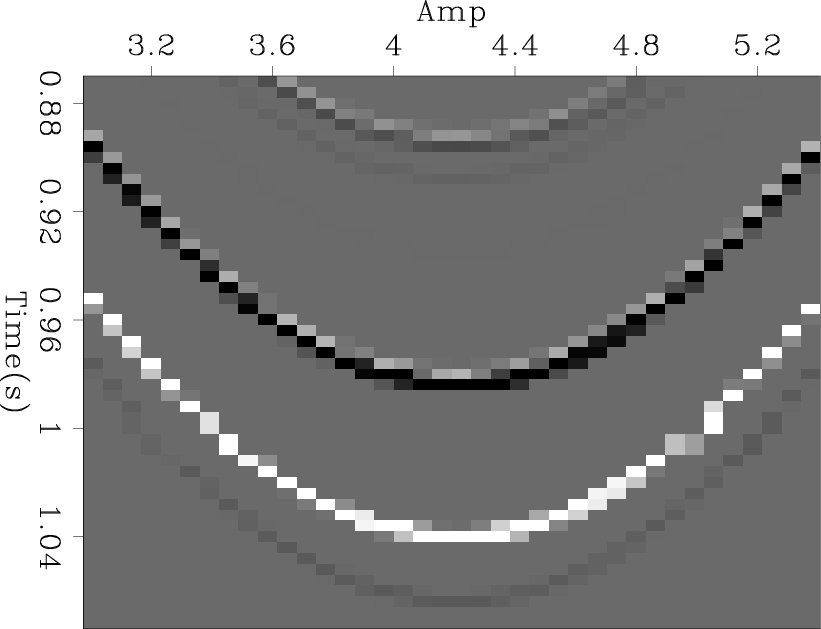
2d-synthetic-model,2d-synthetic-model-local
Figure 8. 2D reflection model we used to to generate our synthetic data: (a) the global view; (b) the magnified view in the time window from .872 s to 1.072 s and in CMP_x range from 3 km to 5.4 km. |
|
|

|
|---|
|
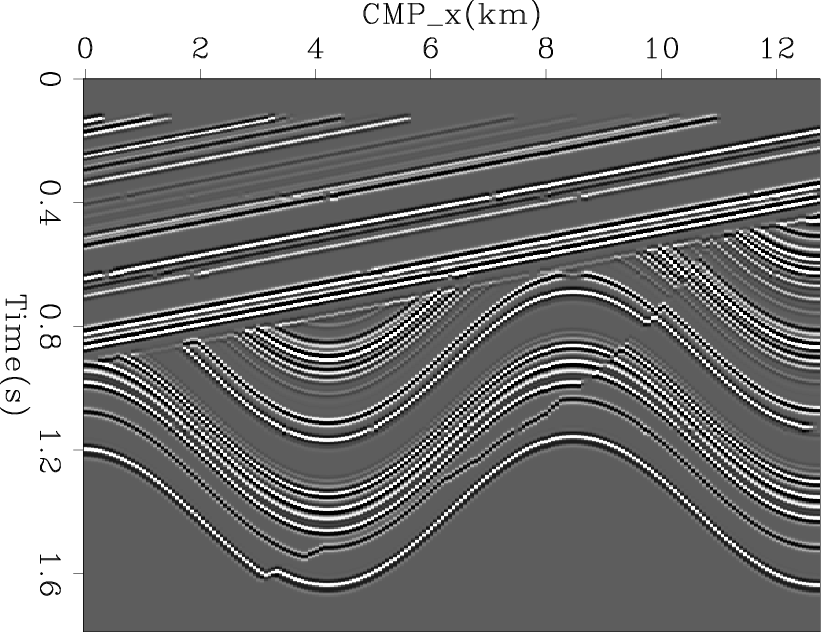
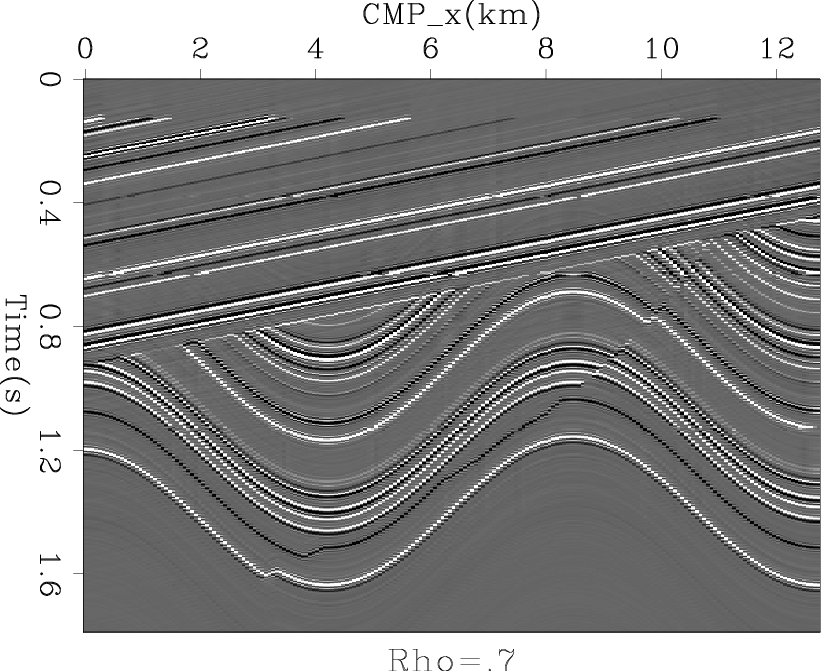
2d-synthetic-data,2d-synthetic-data-local
Figure 9. The synthetic data we used for our test: (a) the global view; (b) the magnified view in the time window from 1 s to 1.2 s and in CMP_x range 3 km to 5.4 km. |
|
|

|
|---|
|
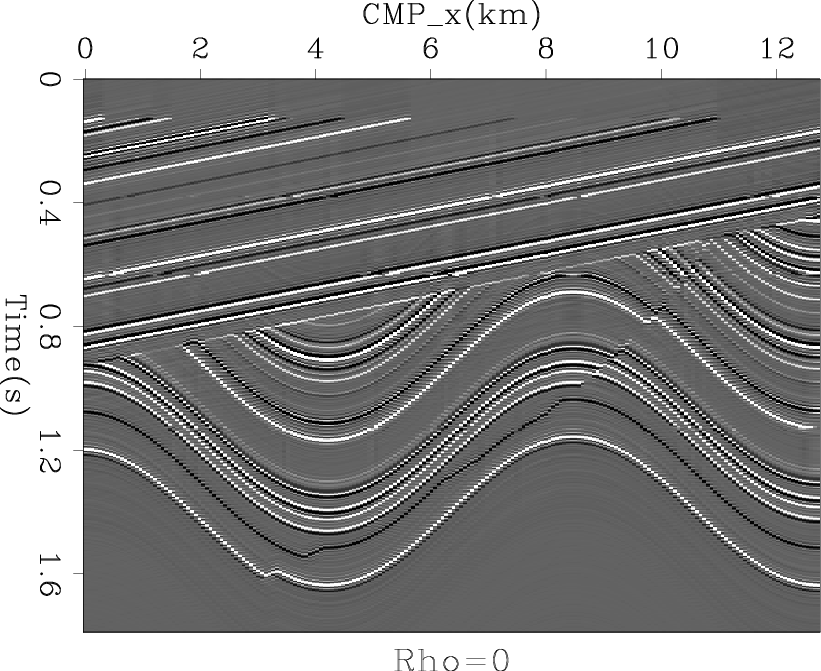
result-rho-0,result-local-rho-0
Figure 10. The result of bidirectional deconvolution using a spike as initial filters |
|
|
|
|---|
|
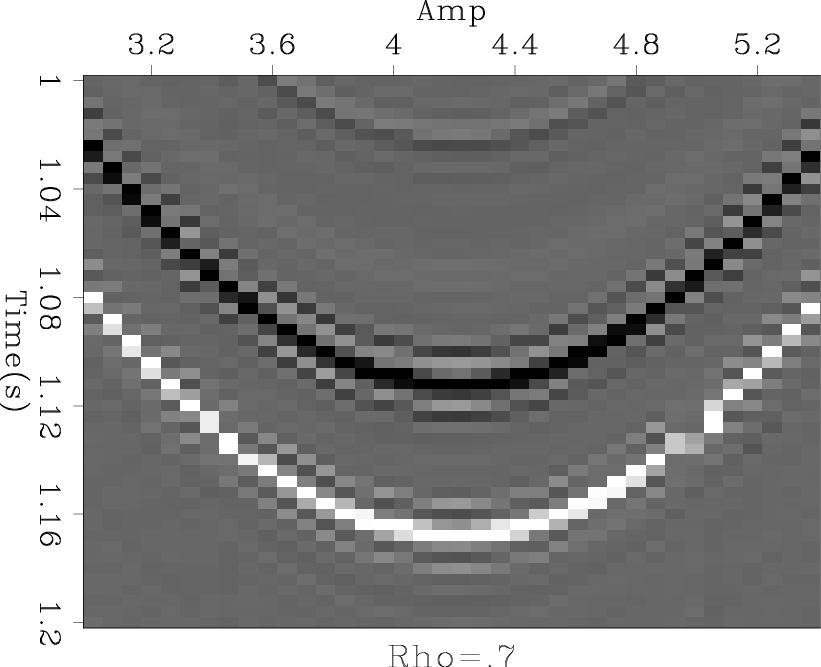
result-rho-7,result-local-rho-7
Figure 11. The result of bidirectional deconvolution using our approximate inverse Ricker wavelet with |
|
|
|
|---|
|
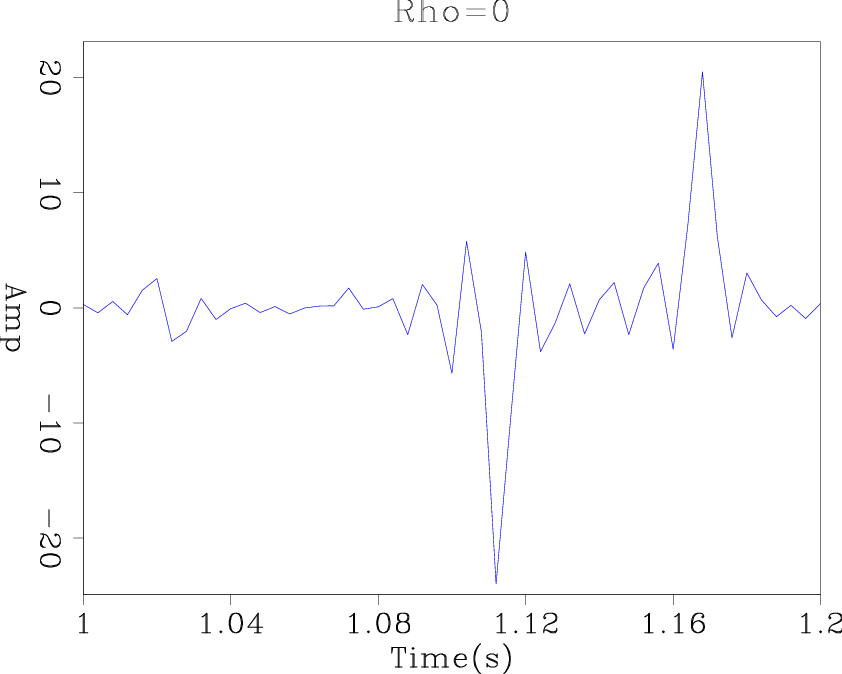
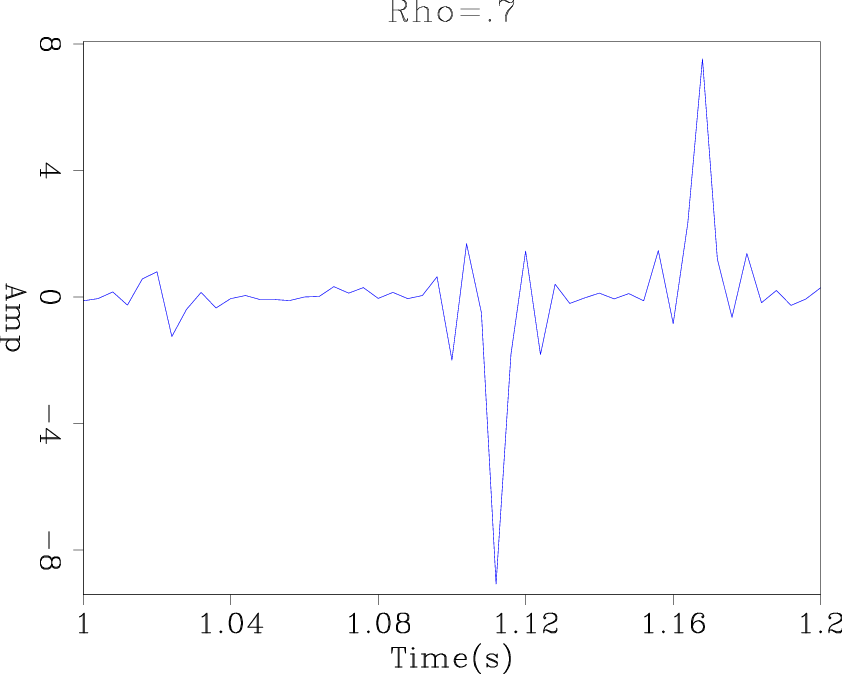
wiggle-local-rho-0,wiggle-local-rho-7
Figure 12. The magnified wiggle plot of the bidirectional deconvolution results at cmp=4.3 km in the time window from 1 s to 1.2 s: (a) with a spike as the initial guess; (b) with an inverse Ricker wavelet as the initial guess. |
|
|
|
|
|
|
An approximation of the inverse Ricker wavelet as an initial guess for bidirectional deconvolution |