|
|
|
|
Implicit finite difference in time-space domain with the helix transform |
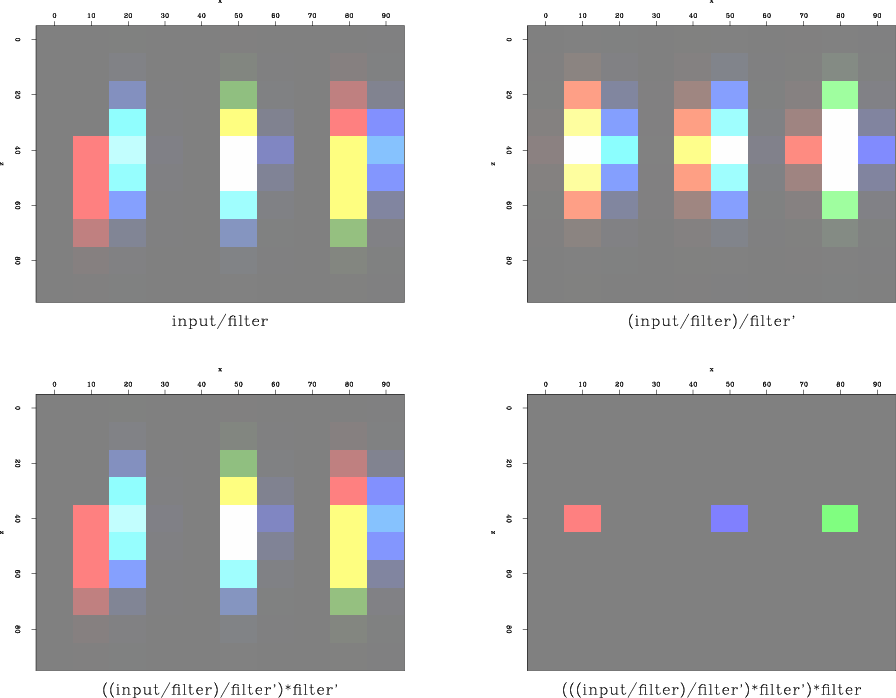
The sequence and it's results are shown in Figure 5. The final result is not a perfect impulse, however the remaining values in the wavefield are 6 or more orders of magnitude smaller than the central impulse.
|
imp-test3-in
Figure 4. Input impulse used for helical convolution test |
|
|---|---|
|
|
|
imp-test3-panels
Figure 5. Results of convolving and deconvolving with filter coefficients whose convolution yields the finite-difference weights required by the implicit finite-difference approximation in Equation 17 |
|
|---|---|
|
|
|
|---|
|
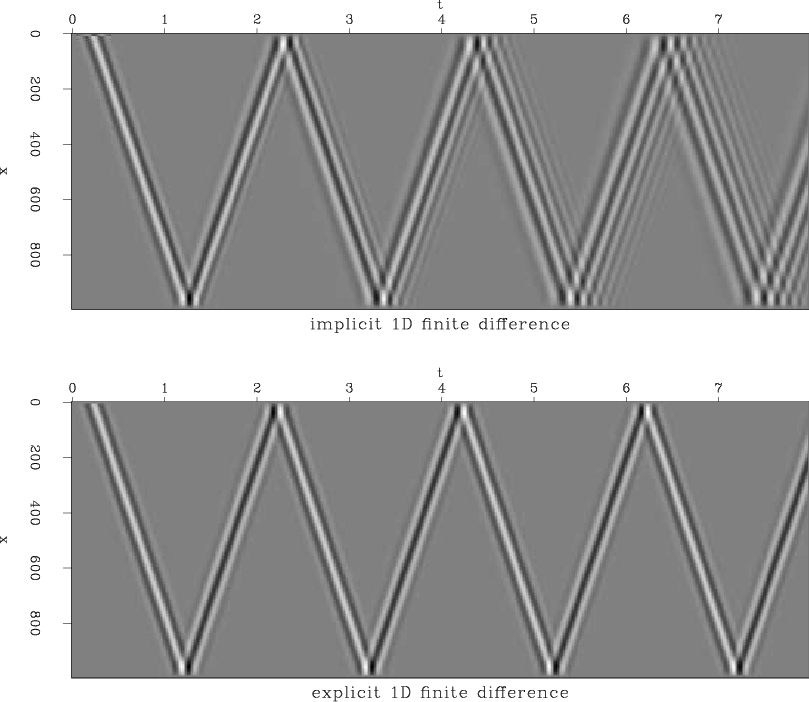
exp-vs-imp-1d
Figure 6. 1D Explicit Vs. Implicit finite difference with constant velocity = |
|
|
In order to test whether the derived implicit finite-difference coefficients are actually valid for wavefield propagation, the next step was to compare standard explicit finite difference to implicit propagation with these coefficients in one dimension. The implicit solution was done using the SEPlib module rtris which recursively solves a tridiagonal equation system.
The results are in Figure 6. Severe dispersion is visible in the implicitly propagated wavefield. So far I have been unable to remove this dispersion without damaging the kinematics of the wavefield.
On the other hand, the wavefield derived by implicit finite difference does not diverge even when increasing the temporal time step beyond the stability limit of the explicit solver.
|
|---|
|
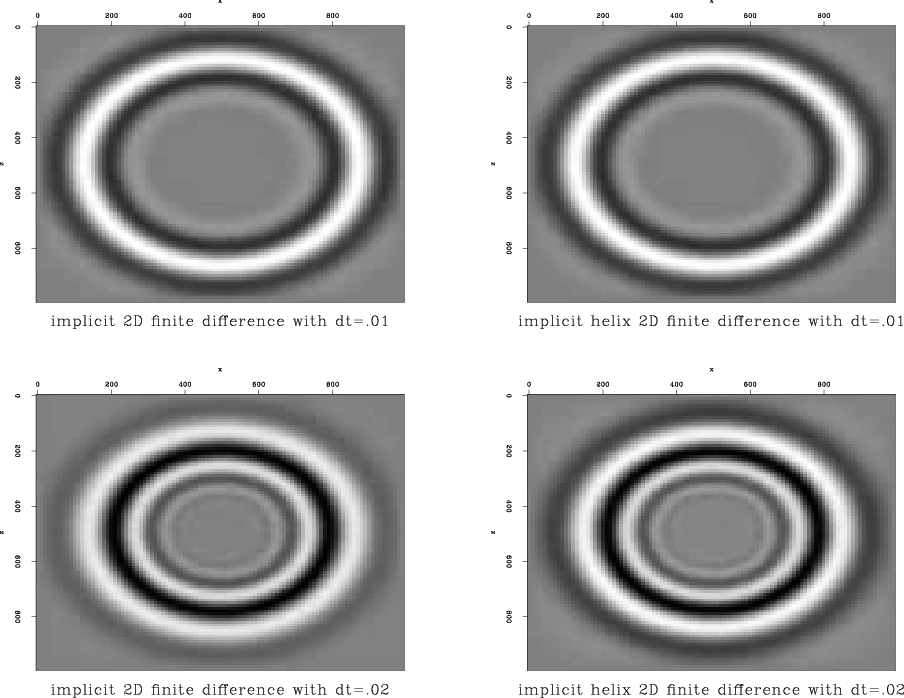
imp-vs-helimp-snap
Figure 7. 2D Implicit Vs. Helical Implicit finite difference with constant velocity = |
|
|
|
|---|
|
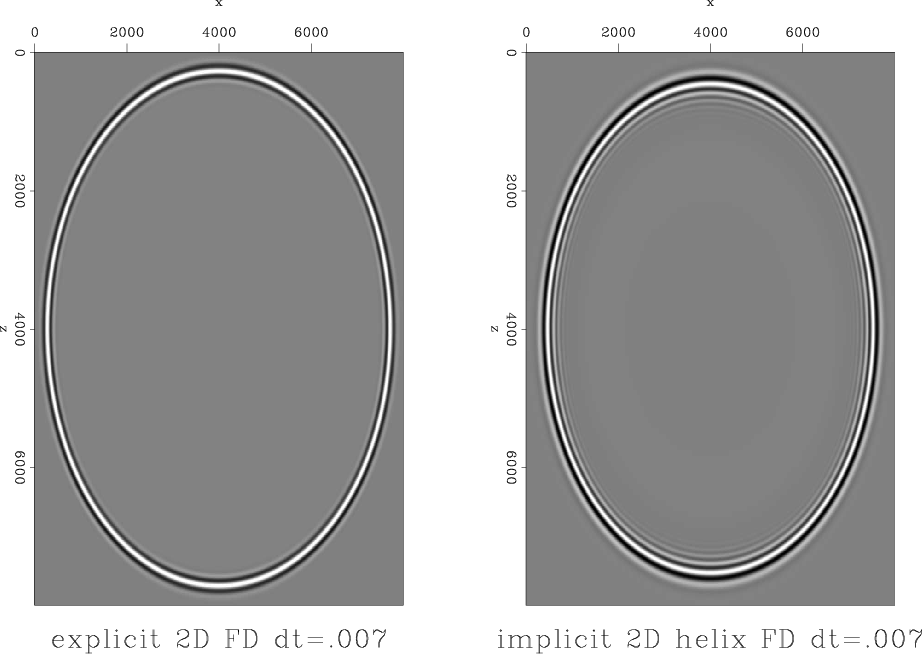
exp-vs-helimp-snap
Figure 8. 2D Explicit Vs. Helical Implicit finite difference with constant velocity = |
|
|
|
|
|
|
Implicit finite difference in time-space domain with the helix transform |