|
|
|
|
Inversion of up and down going signal for ocean bottom data |
The first-order implementation of
![]() , denoted
, denoted
![]() performs wave equation modeling in a model space without the sea surface as shown in Figure 5 (a). Our up-going modeling operator is now approximated as
performs wave equation modeling in a model space without the sea surface as shown in Figure 5 (a). Our up-going modeling operator is now approximated as
| (9) |
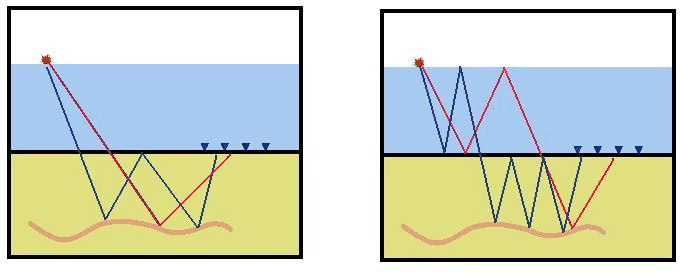
When the sea surface is removed, waves always return to the receiver going upward. There are obvious limitations to
![]() . It can only model primaries and internal multiples. Higher order water reverberations are excluded. Figure 6 shows some events that are captured and excluded by
. It can only model primaries and internal multiples. Higher order water reverberations are excluded. Figure 6 shows some events that are captured and excluded by
![]() .
.
|
|---|
|
upmod
Figure 6. Left: The first-order up-going operator captures all the primaries and internal multiples. Right: It does not capture higher-order water reverberations and any pegleg multiples with a bounce at the sea surface. [NR] |
|
|
On the other hand, we can use the mirror imaging modeling operator to get a first-order estimate of down-going signals, denoted
![]() . This operator performs wave equation modeling by raising the receivers to twice the water depth level as shown in Figure 5 (b). Our down-going modeling operator is now approximated as
. This operator performs wave equation modeling by raising the receivers to twice the water depth level as shown in Figure 5 (b). Our down-going modeling operator is now approximated as
| (10) |
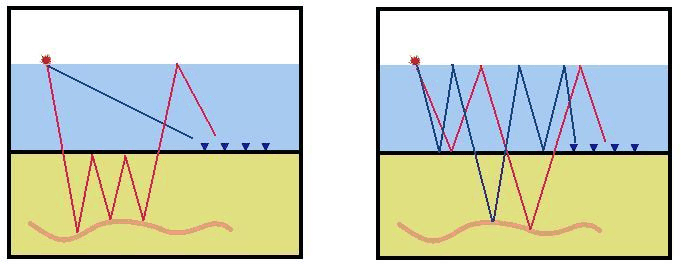
The limitation of
![]() is that it can only image direct arrival and pegleg multiples having only one bounce from the sea surface. Higher-order water reverberations and pegleg multiples with two or more bounces from the sea surface are excluded. Figure 7 shows some events that are captured by
is that it can only image direct arrival and pegleg multiples having only one bounce from the sea surface. Higher-order water reverberations and pegleg multiples with two or more bounces from the sea surface are excluded. Figure 7 shows some events that are captured by
![]() . To do mirror imaging, we had to assume that the sea bottom is flat.
. To do mirror imaging, we had to assume that the sea bottom is flat.
|
|---|
|
downmod
Figure 7. Left: The first-order down-going operator captures the direct arrival and pegleg multiples with only one reflection from the sea surface. Right: It does not capture higher-order water reverberation and any pegleg multiples with two or more bounces at the sea surface. [NR] |
|
|
|
|
|
|
Inversion of up and down going signal for ocean bottom data |