Next: Discussion and conclusions
Up: Examples with real data
Previous: Gulf of Mexico data
As a final example, consider the problem of separating spatially-aliased ground-roll
from body waves in land data. This a more challenging application of
the algorithm because the body waves have curvature that changes
rapidly with both offset and time so to match it I need small filters in
relatively small
patches. The ground-roll, on the other hand, has little global curvature
(although it may have strong local curvature due to aliasing) and matching it
is more successful with large filters in large patches. A refinement to the
method could use different regularization operators or at least different
regularization parameters  on the non-stationary filters for the
primaries and the multiples. For the sake of simplicity, I used the same
regularization for both.
on the non-stationary filters for the
primaries and the multiples. For the sake of simplicity, I used the same
regularization for both.
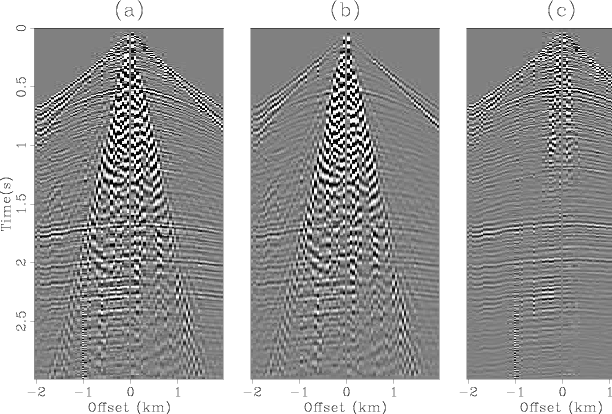
Figure 15 shows the original shot as well as the
initial estimates of the body waves and the ground-roll.
The ground-roll estimate was computed simply by
high-cut filtering the data to 24 Hz using a Butterworth filter with six poles.
I allowed significant energy from the body
waves to leak into the estimate of the ground-roll to illustrate the problem
described in the previous paragraph. Similarly, the estimate of the body waves
was computed by low-cut filtering the data to 18 Hz also with a Butterworth
filter with 6 poles. Since I don't want to reduce the
low frequency components of the signal too much, I allowed strong ground-roll
to leak into the estimate of the body waves. The purpose is to eliminate this
ground-roll without hurting the signal and ideally, mapping back some of the
body-waves from the estimate of the ground-roll.
|
|---|
shot1-estimates1
Figure 15. Land shot gather with strong ground-roll
(a), initial estimate of ground-roll (b), and body waves (c).
|
|---|
![[pdf]](icons/pdf.png) ![[png]](icons/viewmag.png)
|
|---|
|
|---|
shot1-matched-bw
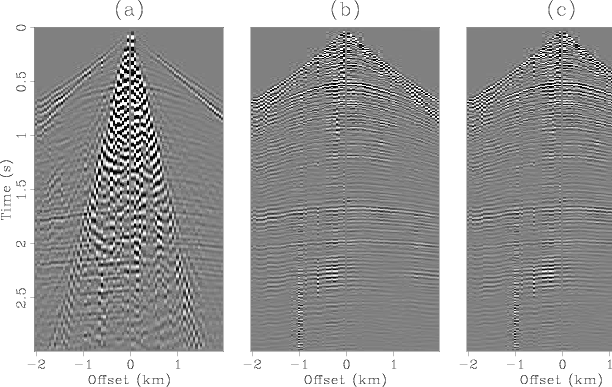
Figure 16. Estimate of body waves after one
outer iteration (a), after 5 outer iterations (b) and after 10
outer iterations (c). Notice how after the fifth iteration the
ground-roll is essentially gone.
|
|---|
|
|
|---|
|
|---|
shot1-matched-gr
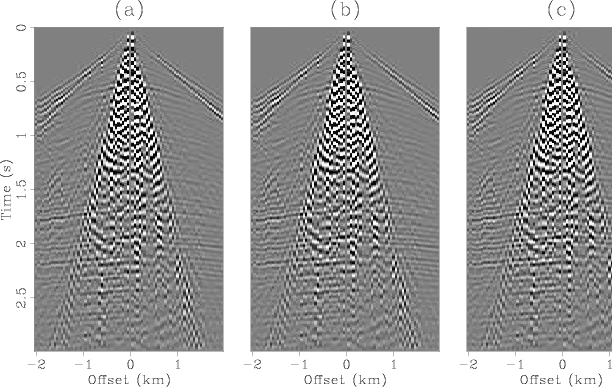
Figure 17. Estimate of ground-roll after one
outer iteration (a), after 5 outer iterations (b) and after 10
outer iterations (c). Some of the body waves have been removed in
panel (c) but much still remains.
|
|---|
|
|
|---|
Figure 16 shows the estimate of the body-waves
after one, five and 10 outer iterations of the proposed algorithm. Even after
just the first iteration, most of the ground-roll has been eliminated and
after five iterations it is almost gone. For this example I used just two
patches in time and one in offset. Figure 17 shows
similar results for
the ground-roll. Since the patches were so large, the energy of the leaked
body-waves were only slightly attenuated (see the reflector at about 1.7 secs).
This energy was mapped back to the estimate of the body-waves.
Next: Discussion and conclusions
Up: Examples with real data
Previous: Gulf of Mexico data
2007-10-24