|
|
|
|
Modeling ocean-bottom seismic rotation rates |
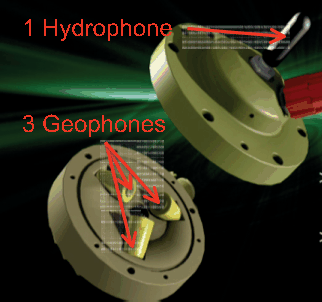
The divergence of particle motion is a spatial derivative. If we knew the displacement values everywhere within the seismic volume, then we could calculate the divergence. However, receiver stations are usually too sparse in relation to the acquired wavelengths to calculate the divergence, and in any case are always spread along a single surface (the sea bottom). The value of the divergence is not redundant even if we measure the three components of the displacement, since it can be used to detect the propagation direction of the waves incident on the sea bottom (upward or downward). The pressure that the hydrophone records is proportional to the divergence of the particle displacements, and is therefore used for upgoing/downgoing wavefield separation.
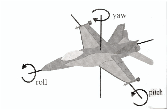
Similar to the divergence, we can measure the rotation of particle motion by calculating the curl of the displacements. As with the divergence, curl is a spatial derivative operator, and insufficient sampling of the waves in the field can inhibit its direct calculation. However, a recently-proposed rotation sensor can be used to measure the rotation ``in place''. A rotation sensor measures the rotation rate (radians/unit time) of the ground at the receiver location. Similar to linear motion, the rotational motion has three components: roll, pitch and yaw. Figure 2 illustrates these motion components.
There are implementations of rotational seismic recording for earthquake seismology (Lee et al., 2009) employing ring lasers. However, these instruments are large and expensive, and are therefore not applicable to exploration acquisition. There have also been attempts to record rotational seismic data with a ``Rotaphone'': conventional geophones arranged along a circle (Brokesova and Malek, 2010). Newer technologies are currently under development to make rotational sensors a viable option for seismic acquisition systems. The interested reader can go to http://www.rotational-seismic.org for more information on this acquisition technology.
|
obnode
Figure 1. An example of a 4 component receiver package. One hydrophone and three geophones provide (after correction for the instrument response) the pressure of the water and the velocity of the sensor package, which is ideally coupled to the seabed. The particle velocity is the time derivative of the displacement vector, and the pressure is proportional to the divergence of the displacement, which is a spatial derivative. |
|
|---|---|
|
|
|
f18
Figure 2. To know what an aircraft is doing, it is not sufficient to know its linear velocity but also the rotations. There are three components to the velocity, and in addition there are three components to the rotation: roll, pitch, and yaw. |
|
|---|---|
|
|
The purpose of this paper is to estimate what kind of rotational motion we may expect in a simple model of ocean-bottom acquisition. We also want to show that additional information about the wave types can be acquired by having rotational motion data.
|
|
|
|
Modeling ocean-bottom seismic rotation rates |