|
|
|
|
Continuous monitoring by ambient-seismic noise tomography |
 , with an SNR
, with an SNR  5 and at offsets between
5 and at offsets between  and
and  meters. These travel-time picks were input into a straight-ray tomography kernel, linearized with perturbations,
meters. These travel-time picks were input into a straight-ray tomography kernel, linearized with perturbations,
 , in an average velocity,
, in an average velocity,
 :
:
 |
 |
 |
(2) |
 |
|
 |
(3) |
 |
|
 |
(4) |
 are the travel-time residuals after accounting for the contribution of the average velocity and
are the travel-time residuals after accounting for the contribution of the average velocity and
 is the offsets for each specific travel-time pick. The tomography-problem fitting goals are posed as follows:
is the offsets for each specific travel-time pick. The tomography-problem fitting goals are posed as follows:
 |
|
 |
(5) |
 |
|
|
(6) |
 operator as regularization to force a smooth model, and the total model is reconstructed by summing with the background velocity.
operator as regularization to force a smooth model, and the total model is reconstructed by summing with the background velocity.
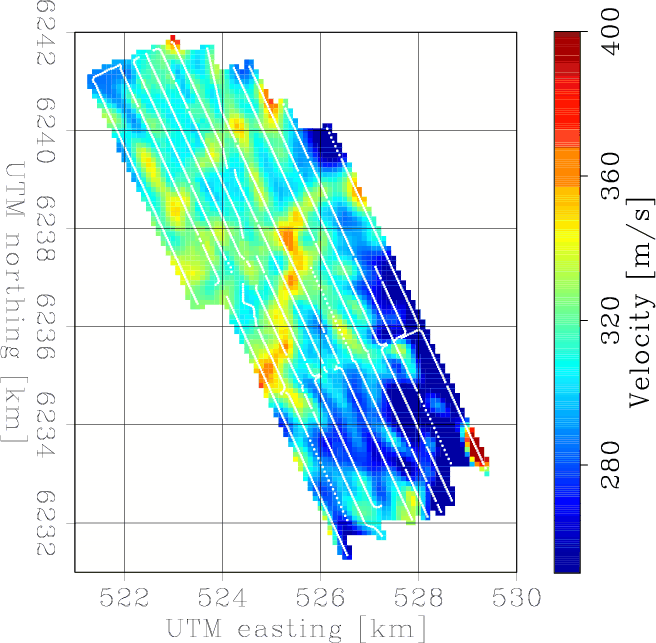
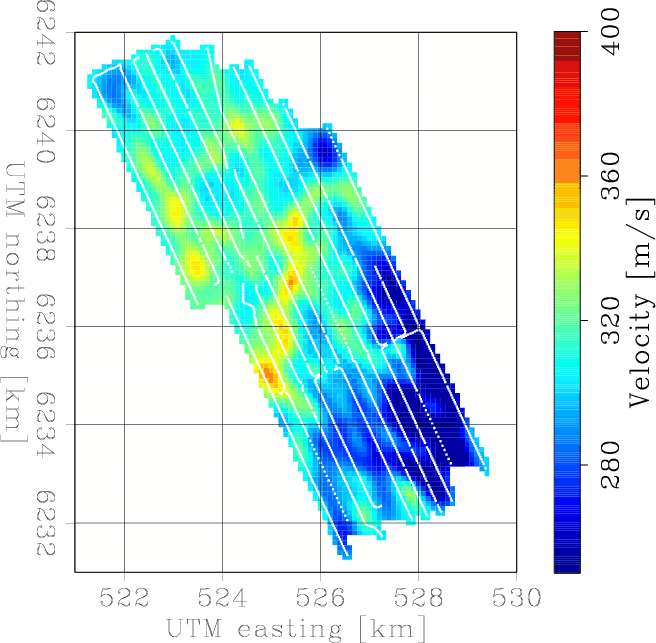
The aim is to create group-velocity maps at different frequencies by picking a group travel time at the peak of the envelope after a narrow-range bandpass. Lower-frequency group-velocity maps should reflect deeper structures, because at lower frequencies (and thus longer wavelengths), surface waves are sensitive to deeper structures. Picking a frequency range that is too narrow would result in an oscillatory wavelet and make travel-time picks less accurate. Figure 9 contains a set of inversion results using virtual sources of different frequency ranges. Six overlapping frequency ranges were selected:
 Hz,
Hz,
 Hz,
Hz,
 Hz,
Hz,
 Hz,
Hz,
 Hz and for
Hz and for
 Hz. At all ranges but the lowest, the wave-mode is very sharply defined in the dispersion image of Figure 5.
Hz. At all ranges but the lowest, the wave-mode is very sharply defined in the dispersion image of Figure 5.



|
|---|
|
JZTomo-C1,JZTomo-C2,JZTomo-C3,JZTomo-C4,JZTomo-C5,JZTomo-C6
Figure 9. Tomography results for various frequency bands:
Hz (a),
Hz (b),
Hz (c),
Hz (d),
Hz (e), and for
Hz (f).
|
|
|
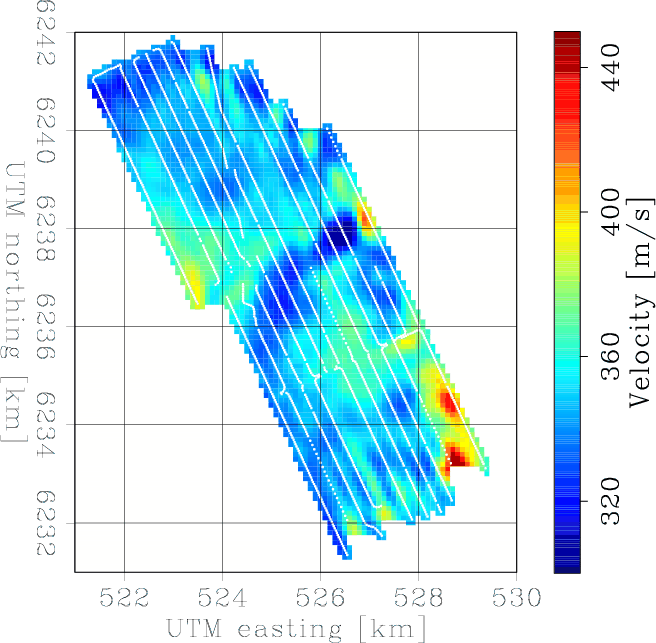
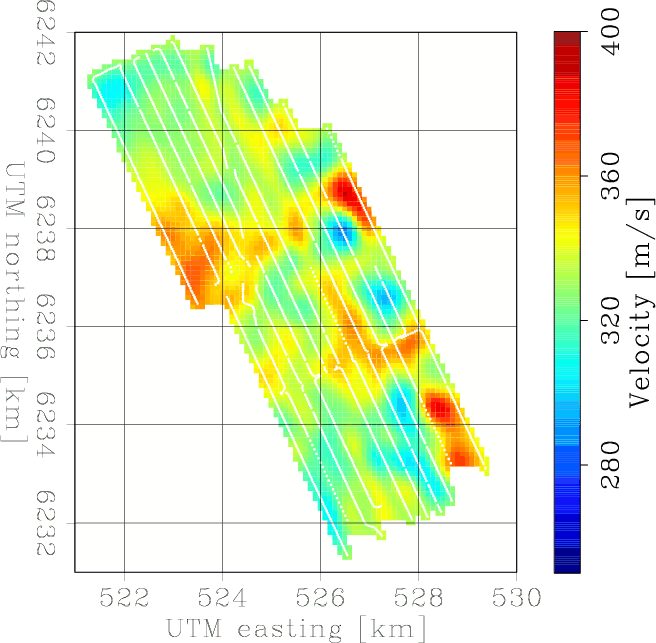
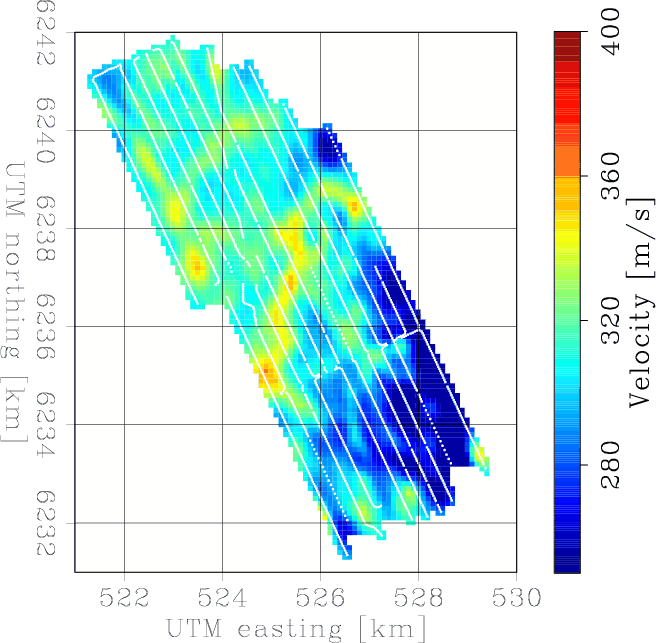
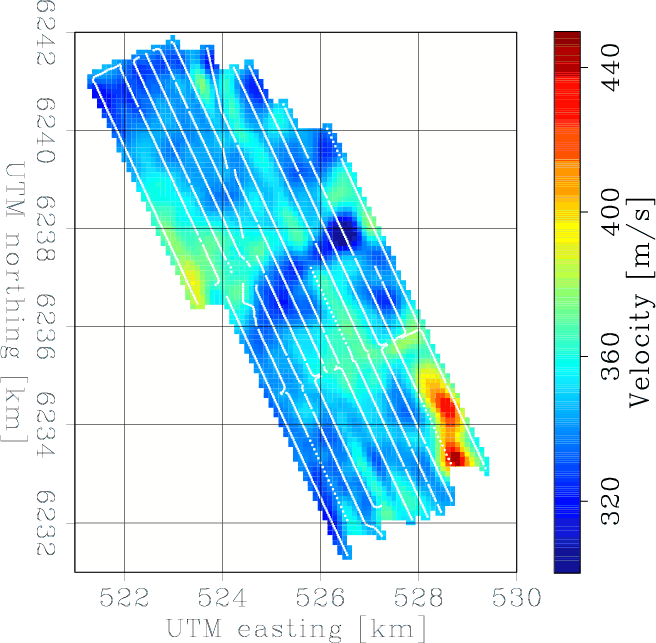
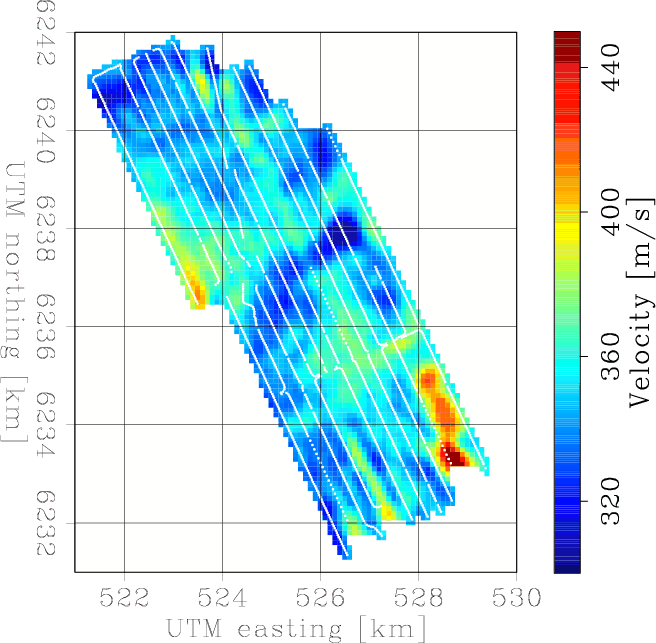
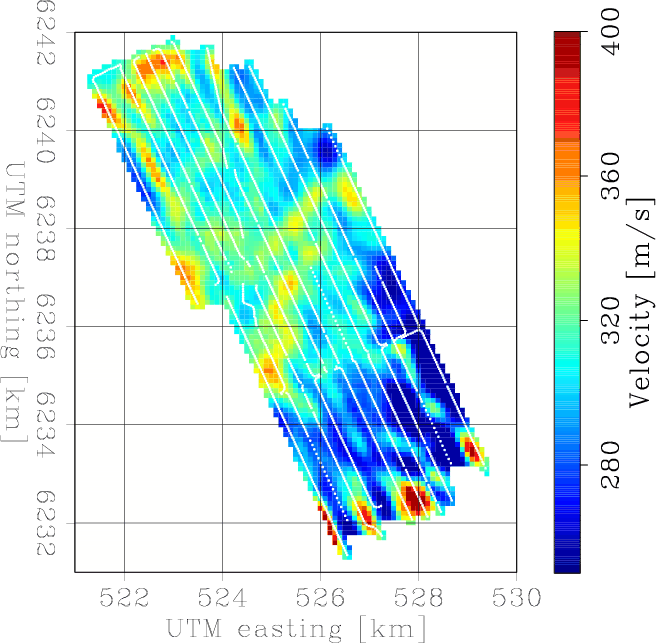
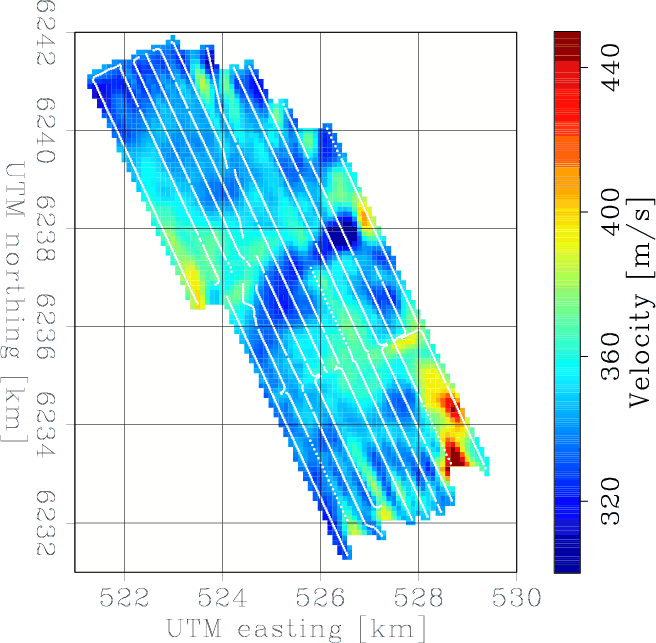
Stacking just one day of data gives five independent stacks. Five tomographic images, one for each day, of group-velocity for the frequency range
Hz are shown in Figure 10. And five tomographic images, one for each day, of group-velocity for the frequency range
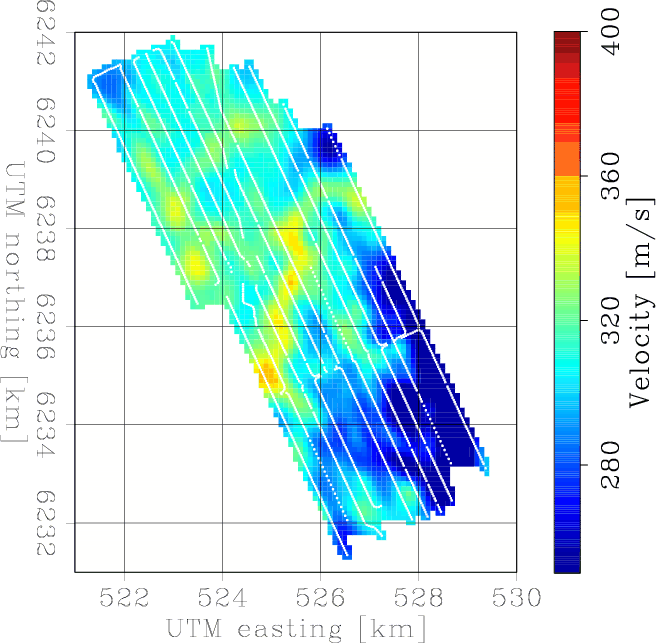
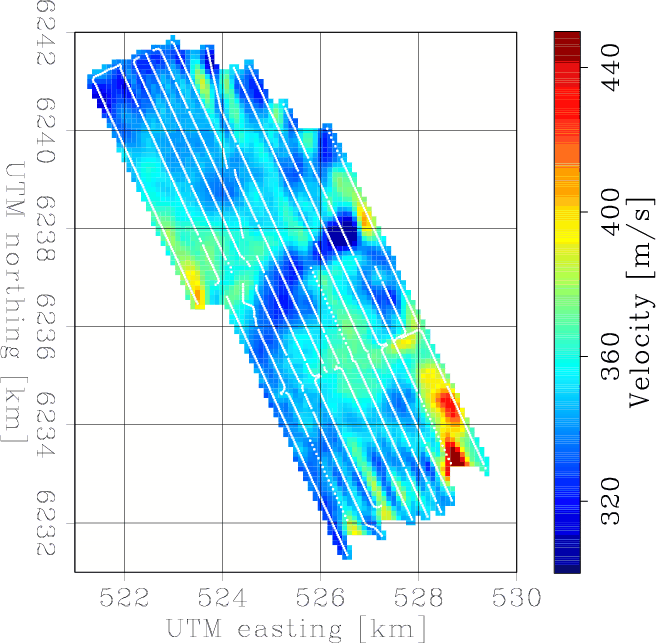
Hz are shown in Figure 11. Stacking two and a half day of data gives two independent stacks. Four tomographic images, of both stacks, of group-velocity for the frequency ranges
Hz and
Hz are shown in Figure 12. These tomographic images are similar but not the same.

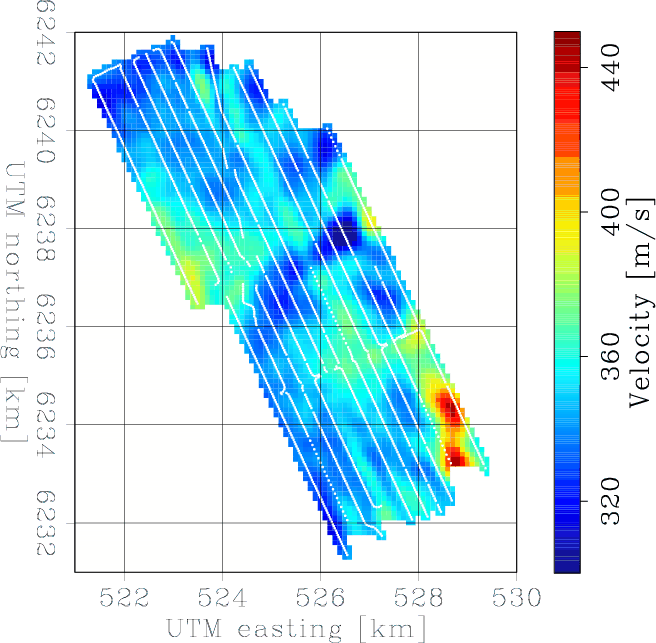

|
|---|
|
JZTomo-d1C3,JZTomo-d2C3,JZTomo-d3C3,JZTomo-d4C3,JZTomo-d5C3
Figure 10. Tomographic results for correlations of one day of data between
Hz: day 1 (a), day 2 (b), day 3 (c), day 4 (d), day 5 (e).
|
|
|


|
|---|
|
JZTomo-d1C6,JZTomo-d2C6,JZTomo-d3C6,JZTomo-d4C6,JZTomo-d5C6
Figure 11. Tomographic results for correlations of one day of data between
Hz: day 1 (a), day 2 (b), day 3 (c), day 4 (d), day 5 (e).
|
|
|

|
|---|
|
JZTomo-h1C3,JZTomo-h1C6,JZTomo-h2C3,JZTomo-h2C6
Figure 12. Tomographic results for correlations of two and a half days of data between
Hz (a) and (c) and for correlations between
Hz: from the first two and a half days in (a) and (b), from the second two and a half days in (b) and (d).
|
|
|
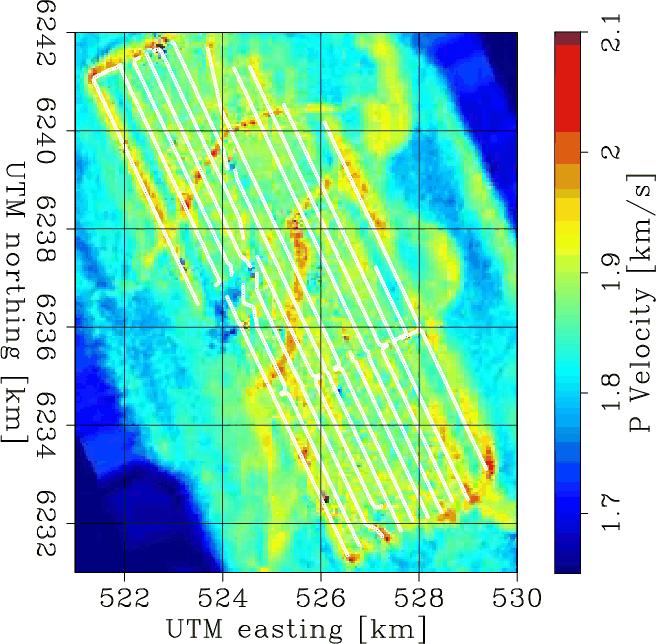
We can compare these group-velocity images to P-wave velocity images obtained by full wave-form inversion of active seismic surveys (Sirgue et al., 2010). These images include features extending beyond the extent of the receiver array, because the active sources cover a wider area than the receivers do. Whereas the maps obtained from ambient-seismic noise tomography are logically confined within the area of the recording array. In the  meters below the seafloor, the P-wave velocity maps show several buried channels as high-velocity anomalies. The bigger channel on the east is as deep as
meters below the seafloor, the P-wave velocity maps show several buried channels as high-velocity anomalies. The bigger channel on the east is as deep as  to
meters. There are smaller channels buried in the top
to
meters. There are smaller channels buried in the top  meters. Below one of the smaller shallow channels is a low-velocity zone that crosses the array; this feature is apparent between
meters. Below one of the smaller shallow channels is a low-velocity zone that crosses the array; this feature is apparent between  and
meters.
and
meters.



|
|---|
|
map3,map4,map5,map6
Figure 13. Image of P-wave velocities obtained using wave-form inversion of active P-wave data (Sirgue et al., 2010). Velocity slices are for the following depth ranges:  m (a),
m (a),  m (b),
m (b),  m (c), and
m (c), and  m (d).
m (d).
|
|
|
|
|
|
|
Continuous monitoring by ambient-seismic noise tomography |