|
|
|
|
Imaging with multiples using linearized full-wave inversion |
|
|---|
|
Zoomv2
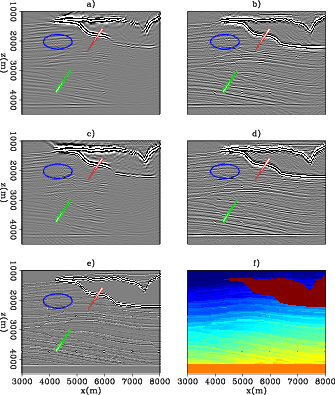
Figure 9. (a) Migration with the noisy primary data, (b) inversion with the noisy primary data, (c) migration with the primary-multiple data, (d) inversion with the primary-multiple data, (e) reflectivity model, and (f) velocity model. |
|
|