|
|
|
|
An approximation of the inverse Ricker wavelet as an initial guess for bidirectional deconvolution |
Zhang and Claerbout (2010) proposed a new method for blind deconvolution to overcome the minimum-phase assumption, called ``bidirectional deconvolution''. A seismic data trace can be represented by a convolution of a wavelet with a reflectivity series,
In conventional blind deconvolution, we assume that ![]() is a minimum-phase wavelet. However this assumption is not applicable for field seismic data. If
is a minimum-phase wavelet. However this assumption is not applicable for field seismic data. If ![]() denotes a mixed-phase wavelet, it can be represented by a convolution of two parts:
denotes a mixed-phase wavelet, it can be represented by a convolution of two parts:
![]() , where
, where ![]() is a minimum-phase wavelet and
is a minimum-phase wavelet and ![]() is a reversed minimum-phase wavelet; hence
is a reversed minimum-phase wavelet; hence ![]() itself is a maximum-phase wavelet. (The superscript r denotes reversed in time.) Thus equation 1 can be rewritten as
itself is a maximum-phase wavelet. (The superscript r denotes reversed in time.) Thus equation 1 can be rewritten as
If we know the inverse filters ![]() and
and ![]() for
for ![]() and
and ![]() , respectively, to satisfy
, respectively, to satisfy
we can recover the reflectivity series:
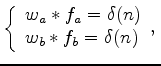
Now we can use nonlinear inversion to solve this blind deconvolution problem for a mixed-phase wavelet by solving the two equations below alternately:
where both ![]() and
and ![]() are minimum-phase signals.
are minimum-phase signals.
Shen et al. (2011) proposed another method to solve equation 4. Instead of solving for ![]() and
and ![]() alternately, they solve
alternately, they solve ![]() and
and ![]() simultaneously. Using this new approach allows us to estimate results with similar waveforms for
simultaneously. Using this new approach allows us to estimate results with similar waveforms for ![]() and
and ![]() , which is a natural characteristic for data with a Ricker-like wavelet. In addition, this new method is faster than previous one. Hence we will use this to perform bidirectional deconvolution.
, which is a natural characteristic for data with a Ricker-like wavelet. In addition, this new method is faster than previous one. Hence we will use this to perform bidirectional deconvolution.
Since bidirectional deconvolution is a nonlinear problem, it requires that the starting model be close to the true one, and it is highly sensitive to the initial guess for both ![]() and
and ![]() . Shen et al. (2011) uses a simple one-spike impulse function for both filters. However, sometimes the true model does not resemble an impulse function. Therefore, we attempt to find a better initial guess.
. Shen et al. (2011) uses a simple one-spike impulse function for both filters. However, sometimes the true model does not resemble an impulse function. Therefore, we attempt to find a better initial guess.
|
|
|
|
An approximation of the inverse Ricker wavelet as an initial guess for bidirectional deconvolution |