|
|
|
|
Cyclic 1D matching of time-lapse seismic data sets: A case study of the Norne Field |
 is the match filter,
is the match filter,
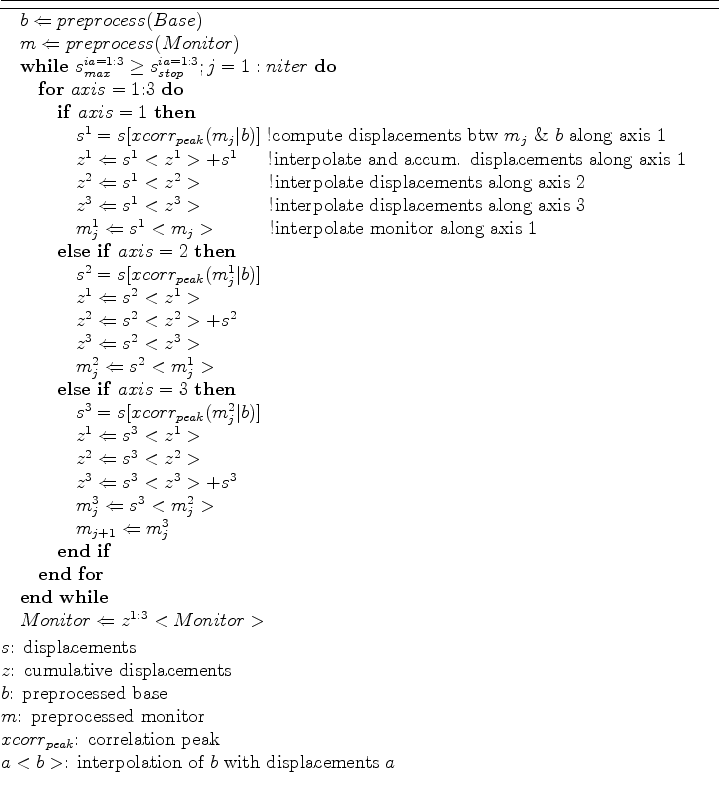
At each trace location, local match filters are non-linear functions of the estimation parameters. Usually, these parameters are selected by a manual trial-and-error approach. This can be a tedious or impossible challenge due to the strong non-linearity of the problem and the large size of seismic data sets. Furthermore, in most cases a single set of parameters is used for all traces locations. While a particular parameter set may result in satisfactory filter estimates in some parts of the data volume, it may result in very poor filters in other parts.
Here, an evolutionary programming (EP) method is used estimate the optimal filter parameters at each trace location. EP belongs to a class of global optimization methods called evolutionary algorithms. These algorithms solve optimization problems using Darwinian evolutionary principles of natural selection. Although any global optimization method may be used, the EP method was chosen because of its easy implementation, easy parameterization and flexibility. The optimized estimation parameters include estimation window size and taper, filter-length and the damping factor. Ayeni and Nasser (2009) provide a more detailed description and an application of evolutionary programming to the match filtering problem. An extended version of this filter estimation approach that is used in this paper is presented in Algorithm 4.
|
|
|
|
Cyclic 1D matching of time-lapse seismic data sets: A case study of the Norne Field |