|
|
|
|
Blocky velocity inversion by hybrid norm |
|
|---|
|
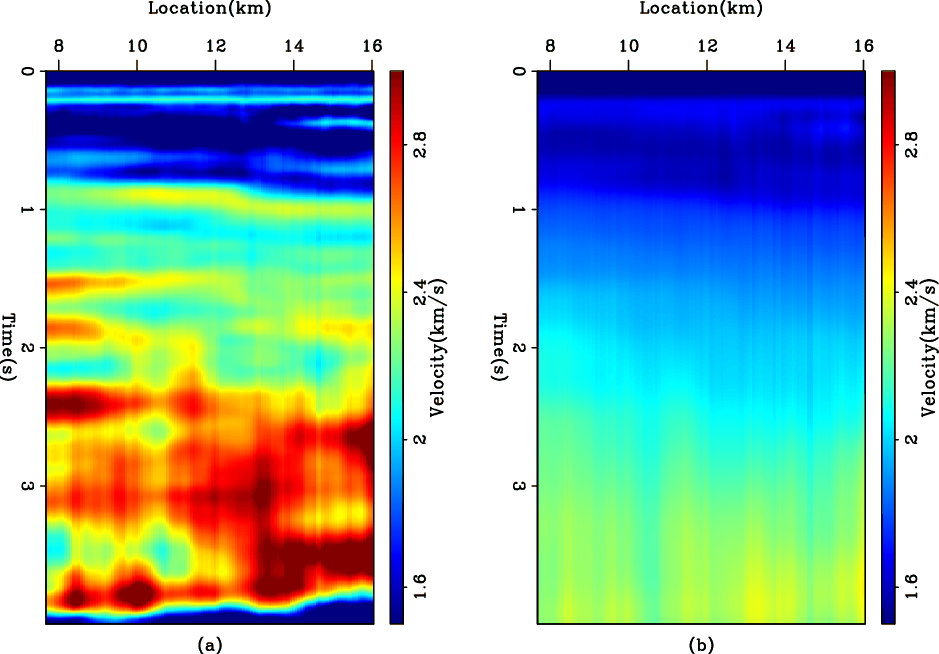
l2-lab46
Figure 9. The WG dataset. (a) The interval velocity resulted by using the first derivative operator in four directions as a regularization in the |
|
|
|
|---|
|
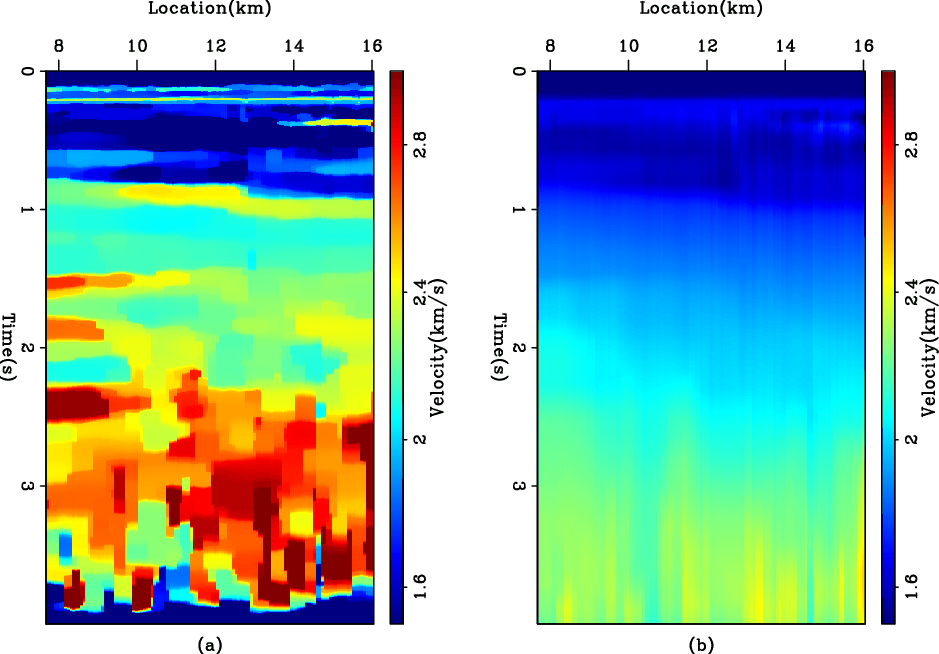
hbe-lab45
Figure 10. The WG dataset. (a) The interval velocity resulted by using the first derivative operator in four directions as a regularization in the hybrid norm. (b) The reconstructed RMS velocity. |
|
|
|
|
|
|
Blocky velocity inversion by hybrid norm |