Next: Dipping water-bottom
Up: kinematics of 3D multiples
Previous: kinematics of 3D multiples
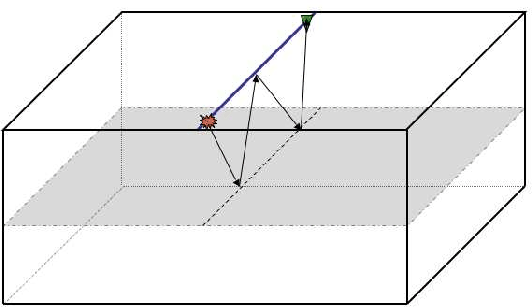
Figure 1 shows a sketch of a specular water-bottom multiple
from a flat water-bottom. The inline direction is oriented in the  direction
and the crossline direction in the
direction
and the crossline direction in the  direction. Because both the surface and
the water-bottom are flat, the multiple reflection happens entirely in the vertical
plane directly below the source-receiver line as is intuitively obvious. Following
the discussion in chapter 2, the inline and crossline subsurface offsets of the multiple
(
direction. Because both the surface and
the water-bottom are flat, the multiple reflection happens entirely in the vertical
plane directly below the source-receiver line as is intuitively obvious. Following
the discussion in chapter 2, the inline and crossline subsurface offsets of the multiple
( and ) are, respectively:
and ) are, respectively:
where  and
and  are the components of the surface offset vector in
the inline and crossline directions, and
are the components of the surface offset vector in
the inline and crossline directions, and  is the azimuth of the source-receiver line
with respect to the inline direction.
is the azimuth of the source-receiver line
with respect to the inline direction.
3d-mul-sktch1
Figure 1. Raypath for a 3D Water-bottom multiple from a flat
water-bottom. The multiple propagation is entirely contained in a vertical plane.
|
|
![[pdf]](icons/pdf.png) ![[png]](icons/viewmag.png)
|
|---|
The travelpath of the multiple itself is azimuthally invariant and so the depth of the image
point  and its location are the same as in chapter 2 (equations
and its location are the same as in chapter 2 (equations ![[*]](icons/crossref.png) and ). The residual moveout equations of the multiple in the inline and crossline
directions are given by slightly modified versions of equation :
and ). The residual moveout equations of the multiple in the inline and crossline
directions are given by slightly modified versions of equation :
Notice that the azimuthal invariance of the depth and spatial location of the image
means that, in terms of the subsurface offset magnitude and reflection azimuth (which
for a flat reflector equals the surface azimuth), the residual moveout of the multiple
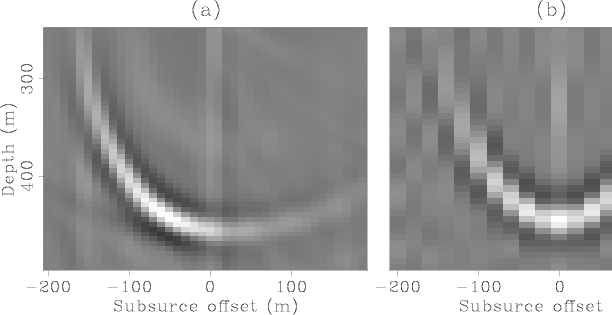
in the SODCIG is exactly the same as in the 2D case of chapter 2. Figure 2
shows the inline SODCIG (panel (a)) taken at zero crossline offset and the crossline
SODCIG (panel (b)) taken at zero inline offset. The data was modeled directly in CMP
gathers and therefore is completely regular in inline and crossline surface offsets.
I modeled both positive and negative crossline surface offset and hence the residual
moveout of the multiple spans both positive and negative subsurface offsets.
|
|---|
sodcig
Figure 2. SODCIG for a water-bottom multiple from a
flat water-bottom. Panel (a) is the inline subsurface offset gather at zero crossline
subsurface offset and panel (b) is the crossline subsurface offset gather at zero
inline subsurface offset.
|
|---|
|
|
|---|
Next: Dipping water-bottom
Up: kinematics of 3D multiples
Previous: kinematics of 3D multiples
2007-10-24