




A path through a volume can be defined as a parametric curve ![]()
![]() , where M is the number of dimensions and t is a free parameter.
, where M is the number of dimensions and t is a free parameter.
In practice, though, what a user specifies is not a continuous ![]() but rather a finite, discrete set of vectors corresponding to points along
but rather a finite, discrete set of vectors corresponding to points along ![]() , say
, say ![]() . In each dimension
. In each dimension ![]() , a set
, a set ![]() can be formed, where
can be formed, where ![]() refers to the jth coordinate of vector xi. So, from a set of N vectors, M sets each containing N parameter-coordinate pairs are obtained. Each Xj is correctly viewed as a discrete set of samples from the xj(t), a scalar continuous function.
refers to the jth coordinate of vector xi. So, from a set of N vectors, M sets each containing N parameter-coordinate pairs are obtained. Each Xj is correctly viewed as a discrete set of samples from the xj(t), a scalar continuous function.
Recovering each xj(t) from its samples Xj is a standard problem in interpolation. Assuming that the user has sampled densely enough so that there are no high-frequency oscillations for ![]() between samples, a good interpolating function for each xj(t) can be constructed using a cubic spline Hou and Andrews (1978). A cubic spline is a curve that passes through the sample points and has continuous first and second derivatives. Thereafter, the interpolated curve can be sampled as densely as needed to give a good visual representation of the path.
between samples, a good interpolating function for each xj(t) can be constructed using a cubic spline Hou and Andrews (1978). A cubic spline is a curve that passes through the sample points and has continuous first and second derivatives. Thereafter, the interpolated curve can be sampled as densely as needed to give a good visual representation of the path.
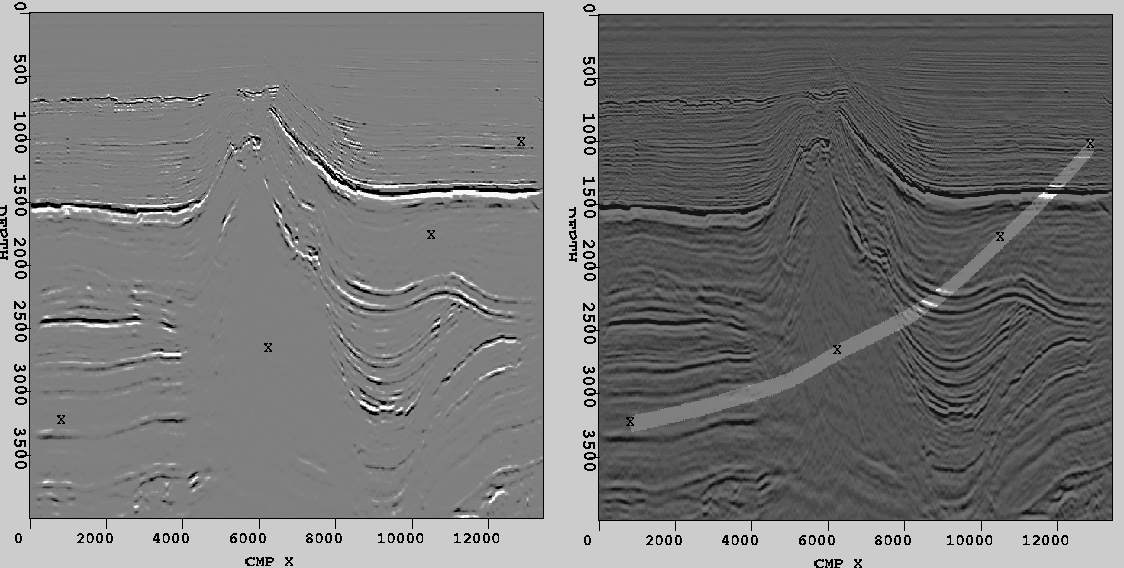
A very sparse set of starting samples is shown on the left of Fig. 6, marked with x symbols. Using cubic spline interpolation and then sampling at a higher rate, the curve shown on the right of Fig. 6 is obtained. The user only has to specify a minimal set of points, as few as two, to generate a path. In fact, Path View includes an algorithm, described in Section 3.3, to allow the user to input unordered points, such as first specifying two endpoints and then specifying a middle point.
 |
