|
|
|
|
Joint imaging with streamer and ocean bottom data |
Recent advances in seismic acquisition and imaging, and improved understanding of the relationships between seismic data and rock-fluid properties have contributed to the successful applications of time-lapse seismic to hydrocarbon reservoir monitoring. However, a complex network of in-sea and sub-sea installations often poses restrictions on seismic vessels near the production facility. Operators wishing to monitor production at these sites are faced with operational difficulties when using the conventional towed-streamer method. The negative impact of such restrictions has been mitigated with undershooting, which utilizes independent shot and streamer vessels to navigate around obstacles. However, even with undershooting, acquisition repeatability is difficult. For example, there are still missing short-offset illuminations, and azimuth distribution can be inconsistent between monitoring surveys.
|
|---|
|
geometry
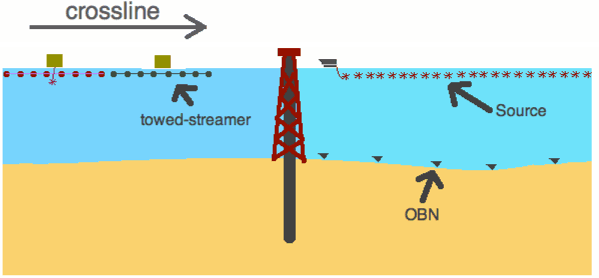
Figure 1. The source and receiver geometry of a towed streamer survey and an OBN survey along the crossline direction. |
|
|
Boelle et al. (2010) have proposed the use of autonomous ocean-bottom nodes (OBN) as a solution for imaging around obstacles. Figure 1 compares the source and receiver geometry between towed-streamer and OBN surveys along the crossline direction of the streamer survey. Autonomous receivers can be planted close to the production facility for acquiring infill time-lapse seismic data to complement streamer data and give a full picture of the target zone. Although it has the advantage of illuminating around the production facility, the OBN method has its own unique processing challenges.
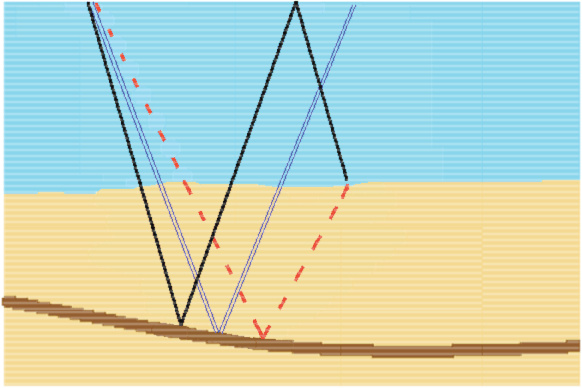
One challenge is obtaining good up-down-separated data from a four-component recording of OBN data. In an ocean-bottom survey, the signal can be classified into an up-going primary and down-going mirror signal (Figure 2). Dash et al. (2009) have used the down-going mirror signal in the migration of OBS data, which yields a wider illumination for sparsely spaced nodes. A reliable migration image requires the hydrophone signal to be decomposed into up- and down-going waves using the geophone and hydrophone recordings. In the case of imperfect up-down separation, there will be residual up-going energy or shear noise in the down-going mirror data. Such energy can give spurious artifacts in the migration image. The OBN image cannot completely replace the streamer image; instead, it is used to complement the streamer image.
|
|---|
|
illum
Figure 2. Three main modes of imaging. Up-going ocean bottom data in dashed-red, mirror ocean-bottom data in solid-black, and streamer data in double-line blue. Notice the subsurface reflection point is different for each mode given the same offset distance between the source and the receiver. |
|
|
Instead of treating the streamer and the OBN images separately, we propose an iterative linear least-squares inversion scheme that could coherently combine the information from the two images. The objective of the data processing is to put everything together and not overload the interpreter with alternative images. Combined ocean bottom nodes and streamer surveys offer the best of both methods: the economy of streamers and the ability of nodes to cover obstructed areas. Such an inversion can improve the structure and aperture of the seismic images by using two sets of signals. In the following sections, we will first discuss the theory of the joint linearized least-squares inversion, and then we show the results of applying our inversion scheme to a 2D Marmousi model.
|
|
|
|
Joint imaging with streamer and ocean bottom data |