|
 |
 |
 | Data examples of logarithm Fourier-domain bidirectional deconvolution |  |
![[pdf]](icons/pdf.png) |
Next: Trial and error on
Up: Fu et al.: Log
Previous: INTRODUCTION
Claerbout et al. (2011) show the complete derivation of the method. Here, we describe only the major steps of this method. As with any iterative method, we have two issues to solve in one iteration: the update direction and the step length of the update. Below, we disscuss how we can solve these two issues in the logarithm Fourier-domain method.
As we discussed in the previous section, we can decompose the arbitrary data  into three parts: the reflectivity series
into three parts: the reflectivity series  , the minimum phase wavelet
, the minimum phase wavelet  and the maximum phase wavelet
and the maximum phase wavelet  :
:
 |
|
|
(1) |
We wish to solve for the deconvolution filters  and
and  , which should be the inverses of wavelets
and
:
, which should be the inverses of wavelets
and
:
 |
|
|
(2) |
From equation 2, we know that
is minimum phase and
is maximum phase. If we know the deconvolution filters
and
, we can get reflectivity series
as follows:
 |
|
|
(3) |
Next we transform our problem into the Fourier domain. We use capital letters to denote variables in the Fourier domain:
 |
|
|
(4) |
We use  to denote the logarithm of the product of
to denote the logarithm of the product of  and
and  :
:
 |
|
|
(5) |
Our problem then becomes
 |
|
|
(6) |
where
has become our new unknown in bidirectional deconvolution, and we want to update it in each iteration. After some derivation (Claerbout et al., 2011), we get, in the time domain,
 |
|
|
(7) |
where
 means cross-correlation and
means cross-correlation and
 is the hyperbolic penalty function.
is the hyperbolic penalty function.
By Newton's method (using the only first 2 terms of the Taylor expansion), we can calculate the step length  :
:
 |
|
|
(8) |
Because we use Newton's method, this step length
calculated above is not the final value. To obtain the final step length at each iteration, we need another iteration (nested or second-order iteration):
Given the update directions (both for the unknown 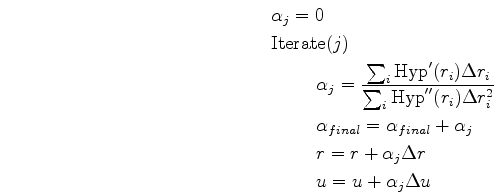 and for the residual
) and the step length
of the update, we have everything we need for each iteration. We can iterate to convergence.
and for the residual
) and the step length
of the update, we have everything we need for each iteration. We can iterate to convergence.
Subsections
|
|
|
|
| Data examples of logarithm Fourier-domain bidirectional deconvolution | |
|
Next: Trial and error on
Up: Fu et al.: Log
Previous: INTRODUCTION
2011-09-13